
Thinking about building your own RTK base station? It’s an interesting challenge that blends engineering expertise with the thrill of improving navigation performance. But in some cases, it may not always be the best option.
Whether you’re a seasoned geolocation professional or a drone hobbyist looking to hone your navigation skills, understanding how to build your own Real-Time Kinematic (RTK) base station may help determine if it’s the right decision for you or your business.
At Point One Navigation, we’ve mastered the art of precision and performance for GPS technology, and now, we’re sharing our insights with you. This article explores the ins and outs of constructing a personal RTK base station, from explaining the DIY appeal to describing the process itself.
However, before diving in, it’s important to weigh the options. Is constructing your own RTK more cost-efficient than a subscription service? How will it impact the performance of your location-based tasks? This article answers these questions and more so that by the end, you’ll be equipped with the knowledge to make an informed decision.
What is an RTK Base?
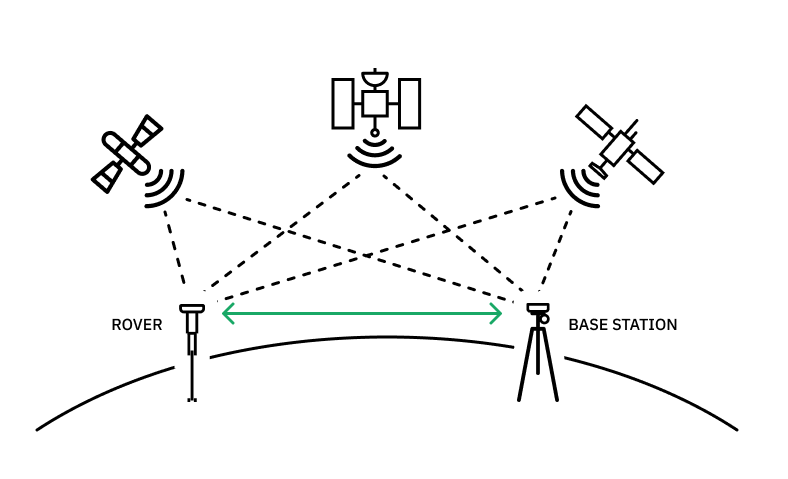
RTK base setup
Real-Time Kinematic base stations are at the core of advanced geospatial technology and are critical for high-precision navigation and location accuracy. An RTK base station is a fixed reference point that sends out correction signals to RTK receivers.
These receivers could be in drones, agricultural machinery, autonomous vehicles, or survey equipment. The base station receives signals from GPS and other satellite systems such as GLONASS, Galileo, or BeiDou. It then calculates differential corrections based on its known location.
These differential corrections account for various errors that affect GPS signals, which can stem from atmospheric disturbances, satellite orbit inaccuracies, or clock errors. By providing real-time corrections, an RTK base enhances the accuracy of positioning data from the RTK receivers for precision down to the centimeter.
Unlike traditional GPS methods like post-processing, which can only correct the data after it’s been collected, an RTK base provides real-time corrections for immediate improvements in positional accuracy. An RTK base station isn’t just a standalone unit—it’s part of a broader network often connected to other bases or networks for wider coverage and redundancy. This connected network forms the backbone of various high-precision location-based services in construction, surveying, agriculture, and autonomous navigation.
Ultimately, an RTK base station is more than a piece of hardware. It’s an important component in the precise location services ecosystem, transforming how we understand and use spatial data in multiple applications.
Why Would You Need to Build Your Own RTK Base?
Setting up your own RTK base station might be appealing for several reasons. However, it’s important to weigh these factors against the practicality and convenience offered by established RTK providers.
Also, know that when we’re referring to “build your own RTK base station,” we mean the process of setting it up: purchasing or renting a base station and then installing and calibrating it at your own work site.
Cost Considerations
For some, the primary motivation to create your own RTK system might be the cost. If you’re facing high subscription fees for accessing a local RTK network, the prospect of a one-time investment in your own station might seem economically sensible.
However, a build-your-own solution will cost $300 or more. It’s also important to remember that initial costs are just the tip of the iceberg. The ongoing maintenance, calibration, updates, and troubleshooting can add up, making a subscription service a more cost-effective choice in the long run.
Coverage and Control
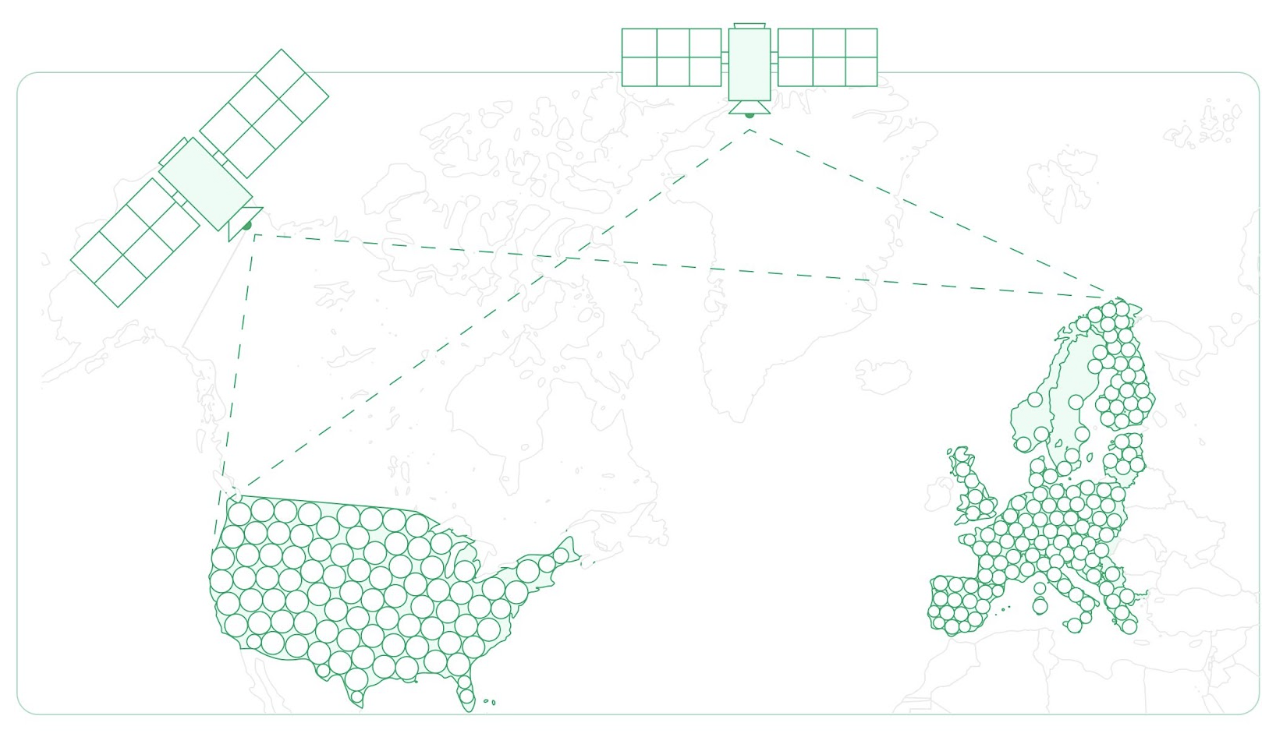
Point One RTK base station density
Another factor for consideration could be the lack of RTK base stations in your area or the desire for more control over the data and its distribution. Operating your own station allows you to tailor the setup to your needs and share or sell data to local partners like governmental agencies or NGOs.
Nonetheless, this level of control also comes with responsibilities and technical challenges that often require expertise and commitment beyond the capabilities of many organizations.
Enhanced Performance
With the rapid evolution of GNSS technology, including new satellites and additional frequencies, having your own RTK base station might seem like an opportunity to use these advancements to improve performance.
While this is true to an extent, it’s important to note that modern, professionally managed RTK networks, like those provided by Point One, are continually updated to incorporate these technological advancements so you’re not missing out on performance enhancements.
How to Build Your Own RTK Base Station
Building an RTK base station and system requires a blend of hardware selection, software configuration, and technical know-how. Each step has technical challenges and potential pitfalls. The process is complex and time-consuming, from selecting the right components to ensuring ongoing maintenance and calibration.
It isn’t just about assembling parts; it’s about creating a system that delivers high accuracy and consistent performance.
Here’s a (very simplified) step-by-step breakdown of where you would start:
Step 1: Accessing Base Stations
Your journey starts with selecting the right base station service. This isn’t just about cost; you need base stations that align with your requirements regarding frequency, range, accuracy, receiver compatibility, and more.
Step 2: Picking an RTK GNSS Receiver
The heart of your base station, the GNSS receiver, must be capable of interpreting signals from multiple satellite constellations (GPS, GLONASS, Galileo, etc.) to ensure comprehensive coverage and heightened accuracy. Ideally, it can support all four constellations.
Step 3: Choosing RTK Base Station Software
Choosing the right software is critical for processing data and generating corrections. This software must be reliable, updatable, and compatible with your hardware and the needs of your network.
Step 4: Ensuring Wireless Data Connection
A stable and robust wireless data connection is essential to transmit correction data to your receivers. This connection must be consistent to maintain real-time accuracy, a challenging requirement, especially in remote locations.
Step 5: Identifying a Computer System
A computer system to manage the base station’s operations is a must. This system should be capable of handling large volumes of data and running the necessary software efficiently.
Step 6: Purchasing Connector Cables
Quality connector cables are crucial for linking your hardware components. Poor-quality cables can lead to data loss or interruptions in service.
Step 7: Establishing Known Survey Points
Establishing your base station requires known survey points for calibration. This ensures the accuracy of your station’s corrections, a step that requires precise geodetic expertise.
Step 8: Station Set Up & Maintenance
Putting all these pieces together carefully and accurately includes another several steps. Calibrating your station is a delicate process that demands precision. This step ensures that your base station provides accurate, reliable data to your RTK network.
What if something happens to any part of your RTK system? It’s maintenance time–and troubleshooting, fixing, and getting your station back up and running can be a huge challenge. Plus, the downtime is incredibly costly.
Is It Worth It to Build Your Own RTK?
Setting up your own RTK system might seem like a path to independence and customization, but that isn’t usually the case. It’s important to consider the practical implications and challenges that come with such a venture.
Let’s explore whether it’s truly worth it to build your own RTK, especially when services like Point One Nav have already perfected the technology.
The Expense of DIY RTK
Building an RTK base of reasonable quality starts at a minimum cost of around $300—and this figure doesn’t include the necessary engineering time or support. When you factor in these additional costs, along with the expenses of ongoing maintenance, calibration, and updates, a DIY RTK base station becomes a significantly more expensive endeavor than initially anticipated. Plus, any downtime from maintenance issues will add to your costs as well.
In contrast, correction services like those offered by Point One Navigation are more cost-effective, even with relatively low unit quantity.
Reliability Concerns
A self-built RTK base station introduces lots of potential issues into your system that can be challenging to mitigate. Moreover, establishing point-to-point links can be complex and costly, sometimes requiring regional licenses.
If you’re a professional who’s building your business around location precision–you can’t afford sudden downtime or security threats. Point One Navigation’s solutions are designed to offer high reliability with professional-grade troubleshooting support and secure, encrypted implementation for all protocols.
Built on robust statistics, the system’s algorithms deliver an accurate location combined with a trusted confidence interval, allowing for graceful handling of position uncertainty.
Complexity
Setting up an RTK base station requires a clear, open-sky location—this means it can’t go up against a building or shed. Some RTK builders think it’s like a WiFi access point and then are confused by a bad experience. Finding reliable power sources in optimal base station locations adds a further layer of complexity.
Point One knows first-hand just how complex it can get. Their ready-made RTK network means you can skip all the headaches and get right to cm-accurate positioning, at 99.99% reliability.
User Experience Limitations
A homemade RTK base station requires users to manage and maintain their equipment actively, detracting from the seamless experience of a system that ‘just works.’ Furthermore, conveying the health and status of a DIY station to the user is not straightforward, often leading to frustration and subpar experiences.
In contrast, Point One Navigation’s services are designed for ease of use, providing a user-friendly experience without the need for constant user intervention.
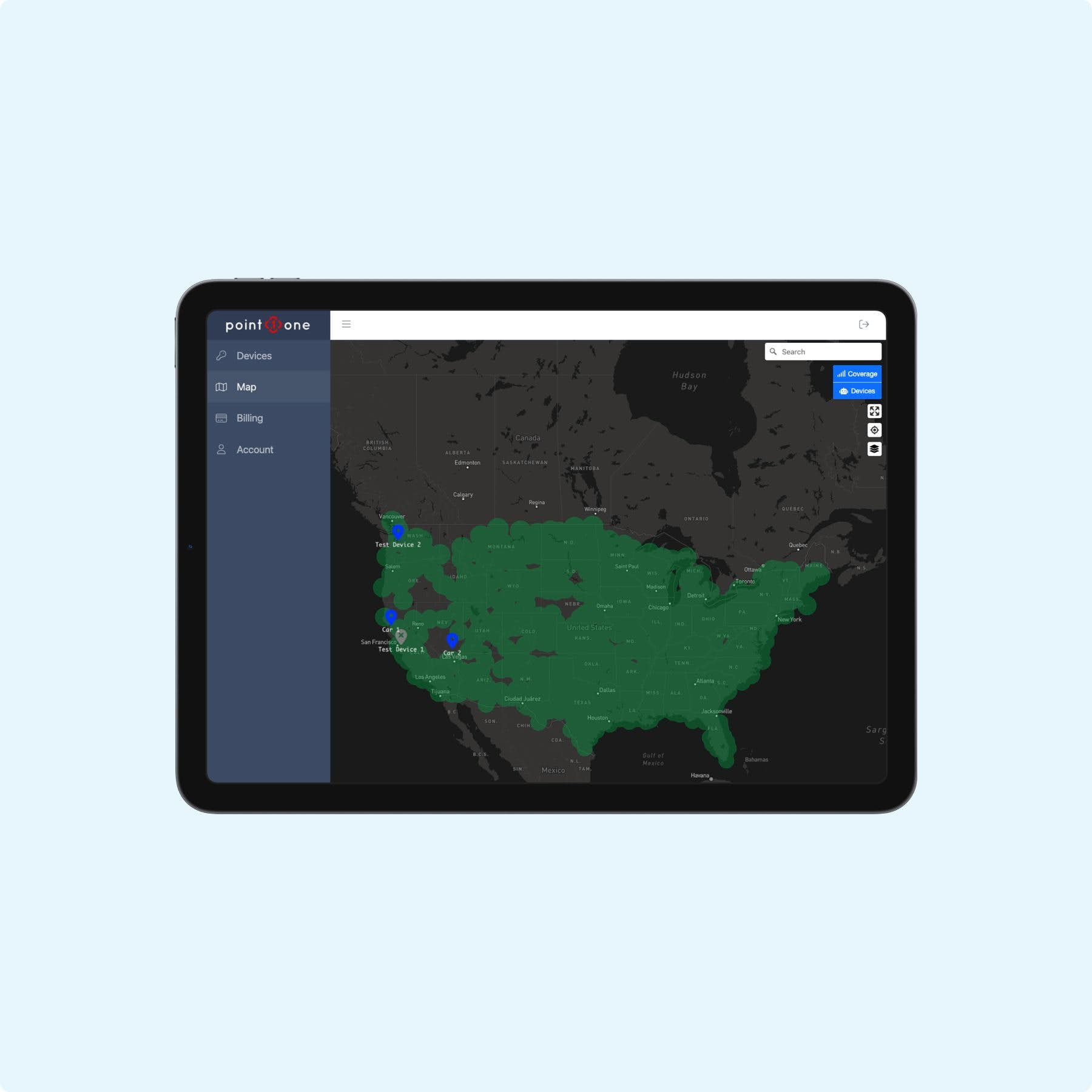
The modern Point One dashboard makes device management easy
Inaccurate Mapping
The accuracy of RTK networks is relative to the base station’s accuracy. If a DIY base is poorly surveyed or moved, it can invalidate all previous mapping, leading to a poor user experience. Similarly, replacing a faulty DIY base station can disrupt the entire system.
Point One ensures consistent, high-accuracy mapping by maintaining stable and professionally calibrated base stations. The corrections network measures common error sources to GNSS and transmits corrections to your device over API. With comprehensive coverage in the US and Europe–1,400 stations and counting–users access centimeter-accurate location data in more places.
Monitoring and Maintenance Challenges
Monitoring a DIY RTK base station for cable failures, antenna problems, foliage growth, or vandalism is challenging. Detecting and rectifying these issues often requires technical expertise that may not be readily available.
Point One Navigation, on the other hand, offers continuously monitored and maintained stations, ensuring peak performance at all times.
Compromise on Quality
To reduce costs, DIY RTK base stations may use lower-end receivers and antennas, which significantly compromises performance, especially in critical conditions like urban canyons or areas with dense tree cover.
Point One Navigation utilizes high-quality components to ensure superior performance in all conditions–leading to unparalleled GNSS accuracy at lighting-fast convergence times (<5s).
More About Building Your Own RTK
While we’ve outlined the challenges and considerations of building your own RTK system, it’s time to go over some common questions and aspects of RTK technology.
How do I choose the right RTK base station?
Once you’ve decided not to build your own RTK, you’ll need to know how to choose the right RTK services. Some important considerations include:
- Accuracy: Accuracy is based on density. The higher the density, the higher the accuracy. Look for networks with extra redundancy in urban areas and one that’s always adding base stations–so you can scale as fast as you need to.
- Protocol support: Some RTK network providers manufacture their own receivers as well. Often, they end up favoring these receivers over others–meaning you may need to get all-new devices for the best experience. Instead, you’ll want to work with a reputable network that is accessible for all protocols.
- Constellation support: Just like there are multiple protocols, there are multiple constellations–GPS, GLONASS, Galileo, or BeiDou–each with multiple frequencies. The best RTK solution will support all frequencies on all constellations. Without it, you’ll suffer from longer fixed times, less precision, and downtime.
- Professionalism: If you’re scaling a business based on location precision, you need a professional, reliable partner that prioritizes security, manages and maintains all aspects of the service, and is constantly adding base stations for increased precision.
For all of these benefits (and others), look to Point One Nav. Even in areas without cellular coverage, Polaris provides high-accuracy GNSS corrections with delivery over satellite, thanks to having the highest overall density of U.S. corrections networks, extra redundancy in urban areas, support for all frequencies on each of the four constellations, and much more.

What you access with Point One’s Polaris
Does RTK work without a base station?
RTK technology fundamentally relies on a base station to provide correction data to RTK receivers. Without this base, the accuracy of the positioning data is significantly reduced, often falling back to the less precise capabilities of standard GPS.
What is needed for RTK?
To establish a functional RTK system, you need a high-quality GNSS receiver, a reliable data transmission method (like a wireless connection), a computer system for processing, and a base station equipped with precise software to calculate and send corrections. The base station must also be positioned at a known, accurately surveyed location for calibration.
What does an RTK base station cost?
The cost of an RTK base station varies greatly depending on the quality of components and the system’s capabilities. A basic setup starts at about $300, but this price can increase significantly with higher-end equipment and necessary additional components like software, data transmission systems, and maintenance tools.
What is RTK GPS?
RTK GPS is an advanced form of GPS technology that enhances positioning accuracy using real-time correction data. By comparing the signals received from satellites with the known position of the base station, RTK GPS can achieve centimeter-level accuracy, far surpassing the accuracy of conventional GPS.
Why Build Your Own RTK Base Station?
While the allure of building your own RTK base station may be strong, the realities of cost, complexity, reliability, and user experience paint a different picture. After exploring some of the intricate details and challenges, it’s time to circle back to a fundamental question: Why go through this demanding process when Point One Navigation has already done it for you?
Point One Nav hasn’t just built RTK base stations–they’ve perfected them. The team of experts has dedicated countless hours to developing and refining RTK technology, ensuring that our systems deliver the highest accuracy and reliability without any of the hassle associated with DIY setups. Point One has tackled the engineering challenges, sorted through the complexities of software and hardware integration, and established a Polaris station network that provides consistent and dependable corrections.
Even in challenging environments, where competing products fail, Point One’s sensor fusion and signal management deliver consistent accurate location, enabling customers to operate with a high degree of confidence.
Ready to experience the pinnacle of RTK precision – without the complexities of building and maintaining your own base station?