
Point One Navigation’s GNSS experts break down the relationship between reference frame datums and epochs, what it means for RTK in GNSS, and explore a specific case study in Korea.
Differences in coordinate systems for navigation
When to use ECEF coordinates vs a reference frame datum
We often think of the coordinates of points on Earth as triples of latitude, longitude and altitude (LLA). When dealing with high-precision systems, we must also say which coordinate frame these LLA coordinates are described in, and at what time (in which epoch) they are expressed. The coordinate frame is defined by the datum, while the time of the measurement defines the epoch.
The coordinates of spacecraft in global navigation satellite systems (GNSS) like GPS are transmitted in Earth-centered, Earth-fixed (ECEF) cartesian coordinates, such as WGS-84 or ITRF14, which are independent of epoch. GNSS receivers naturally compute their locations in these ECEF coordinate systems. These coordinate systems work well for describing positions in space and in the air, but positions on the Earth move over time with respect to ECEF coordinates due to the relative motion of tectonic plates. A physical point fixed with respect to the local geography (for instance, a building corner) will have time varying LLA coordinates in the WGS84 reference frame.
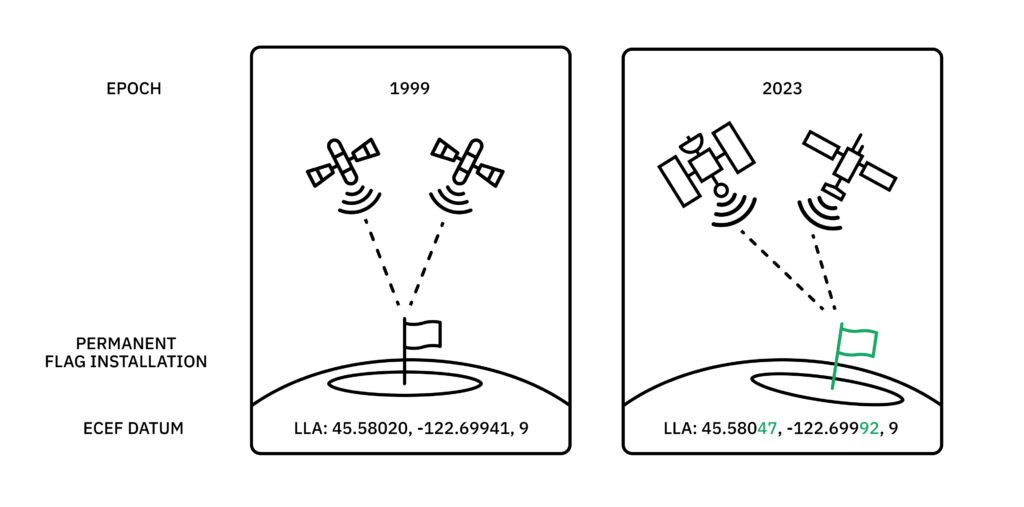
Earth-center, earth-fixed coordinates shift over time due to tectonic drift.
For example, a pole cemented into the ground in 1997 on the west coast of the United States has moved by over 1 m as compared to its position measured today. Using an ECEF coordinate system to map the pole for visual purposes or basic geospatial analysis is sufficient for capturing its location relative to other objects on Earth, but is inadequate for powering navigation solutions that require absolute positioning.
To address this problem, surveyors and other geodesy professionals use coordinate frames fixed to the tectonic plates, such as NAD83 systems in the US. In these plate-relative coordinates, positions measured with respect to local geography are stationary. In the example above, the cemented pole has approximately the same LLA year after year when measured in the NAD83 coordinate frame. While the coordinates are only “approximately” the same because the realization of NAD83 does not perfectly match the actual tectonic drift, the datum provides much improved accuracy for precise positioning use cases.
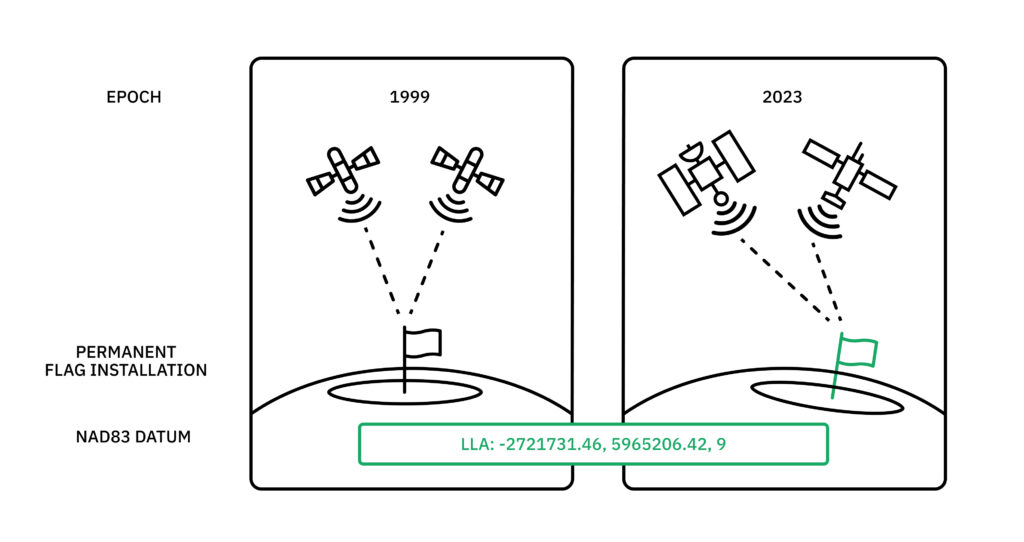
NAD83 coordinates reduce confusion but may not fully account for tectonic drift.
However, this solution has created a discrepancy: latitude, longitude and altitude expressed in WGS84 are different from latitude, longitude and altitude expressed in NAD83. The difference between these two frames is not constant, but is a function of time. Converting between the two requires that we know what time you are interested in understanding. For example, the shift for our pole example may be 1 m for the NAD83 frame at epoch 2019, but may only be 50 cm for NAD83 frame epoch 2005. This makes it impossible to translate between coordinate frames without knowledge of the epoch.
RTK’s relationship with datums & epochs
How RTK corrections data is impacted by discrepancies in datums or epochs
Real-time kinematic positioning (RTK) and similar GNSS corrections systems deliver very high precision, but are only able to measure positions relative to a known point. While RTK solutions are helpful for collecting precise positioning information from GNSS, it’s important to understand how this data is related to reference frame datums and epochs.

RTK corrections are calculated by adding the reference station location to the difference in location between the rover and the reference station.
RTK networks are able to compute positions in the global frame (e.g. WGS84) by computing the position of the rover relative to the reference station and adding this difference vector to the known reference station position. This means that RTK is implicitly in the same frame as the reference station position, broadcast in the RTCM 1005 or 1006 message.
In the cemented pole example above, if we co-locate an RTK reference station, positions computed with observables from this reference station will be in both the frame and epoch in which the RTK reference station was surveyed. Note that even if the reference station was surveyed in WGS84, but the survey was completed in 2005, 50 cm of error would be present if we expected the RTK network to produce results in the 2019 frame.
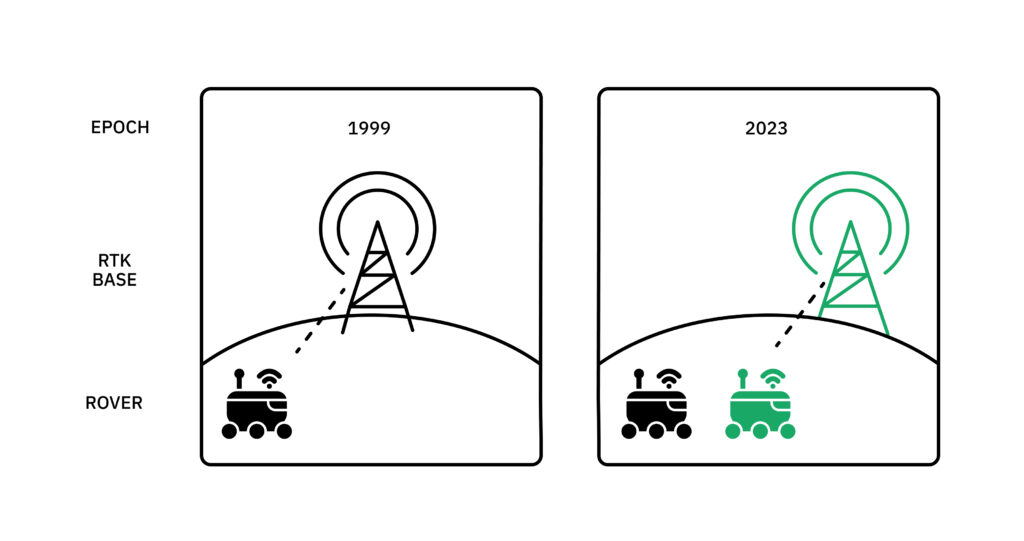
Tectonic drift can also affect RTK corrections.
A case study in GNSS reference frames: Korea
A real-world example of how tectonic shifts and misaligned datums, epochs, & RTK can impact GNSS data
Like the west coast of the United States, Korea also experiences significant, rapid tectonic plate movement. Point One Navigation carried out an experiment in Seoul near the end of 2019 to see just how much this movement can impact LLA coordinates. Here’s what we found.
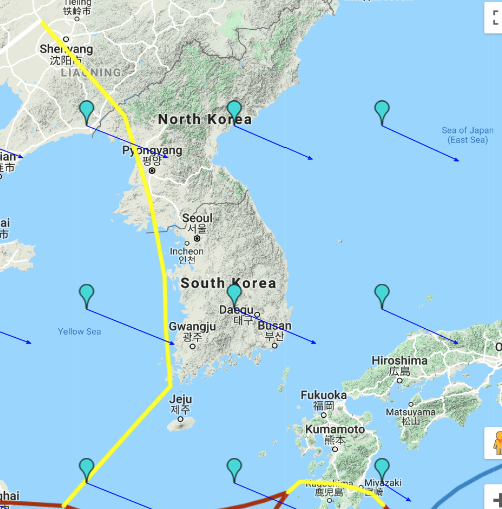
In the figure above, the vectors show the relative movement of the land mass with respect to the IGS08 frame, which is an ECEF frame.
If we look more closely at the IGS08 sample point in the center of the Korean Peninsula, we are given a velocity solution to solve for the discrepancy:

We know that this GNSS reference station has the following parameters:
Observation Data of GNSS Reference Station in Korea (RINEX)
- Datum: ITRF2000
- Epoch: 2002.0
We also received confirmation from the Korea National Geographic Information Institute (NGII) that this is the same epoch used for their systems and used throughout Korea for survey purposes (the KDM2002 datum and epoch).
This indicates the reference station position is associated to a 2002 epoch date. As of the end of 2019, when test drive data were gathered, nearly 18 years have elapsed since the reference network positions were computed and fixed. This leaves a lot of room for error in positioning.
2019.9 – 2002.0 = 17.9 years
Using the NGII velocity to compute position differences over this span of time, we find that we expect the current positions of the reference stations to differ from the epoch 2002 positions by well over half a meter.

Note: these are in North/East/Down coordinates, NOT LLA.
During a test drive in Seoul, we observed a nearly constant offset between the ECEF positions computed using a base station surveyed in the KDM2002 datum and epoch vs those computed using another nearby base station surveyed in the current WGS84 epoch. The mean delta position over that test drive in Seoul can be expressed by the following:

We concluded that this empirical position difference is due to the datum shift. The position bias is nearly constant during the dynamic drive in Seoul, as shown in the figure below. This figure shows North (blue), East (red), and Down (green) position difference components (vertical axis) with respect to GPS time (horizontal axis).

The above figure directly compares RTK solutions calculated by Point One in real time, and post-processed kinematic (PPK) solutions. Position differences are calculated using the following equation: Position (PPK) – Position (Point One RTK). In the right-most section of the graph the test vehicle was driving through an urban canyon where degraded GNSS error swamps the datum shift. The left portion of the graph is mostly open highway with the short deviations due to momentary loss of GNSS (due to passing under bridges, etc).
This type of nearly constant position offset is common for systems operating in different reference frames, or in the same reference frame but at different epochs. The effects are both more easily observed and more significant in areas of faster tectonic drift, and in regions where the local authority mandates using datum and epoch combinations that are far from real time. However, all users of RTK and similar techniques should be aware of the effects of datum and epoch on their computed positions.
Get started with high-precision GNSS solutions
How Point One Navigation empowers developers to seamlessly align datums, epochs, & RTK for the most reliable positioning data
We hope this has been a helpful guide for understanding the complex relationship of reference frame datums, epochs, and RTK. Point One has a suite of navigation-focused positioning solutions to help developers harness true positioning data and ultimately deliver the most precise products and applications to their end users.
Get in touch with the Point One team to learn more, and order a dev kit to get started.
Additional Resources: