
What is dead reckoning?
The term “dead reckoning” has been used in navigation for centuries, referring to deriving a position based on the direction and speed of travel from a starting point. Today, this is also known as inertial sensing, and in practice, it looks very different from the original applications of mariners or explorers. However, the foundational logic of dead reckoning remains relatively the same as it has been for hundreds of years.
For example, modern inertial sensors can be embedded into a car’s tires along with rotary encoders to measure how many accelerations and rotations occur, which you can then use to determine how fast the vehicle is going and in what direction. Using this information, the navigation system can calculate the car’s location based on where and when it started moving.
Dead Reckoning Example
Modern inertial sensors can be embedded into a car’s tires along with rotary encoders to measure how many accelerations and rotations occur, which you can then use to determine how fast the vehicle is going and in what direction. Using this information, the navigation system can calculate the car’s location based on exactly where and when it started moving.
")
While advancements in MEMS and measurement technologies have made inertial sensing more widely available and informative, it’s important to note it does not replace other positioning systems. Rather, dead reckoning is part of an ecosystem of tools that, when combined, produce the most precise positioning data for use in various applications.
Dead Reckoning vs Navigation with Inertial sensing & dual-band GNSS
GNSS technology is largely considered the gold standard for positioning, especially given the rise of multi-band solutions. In reality, the gold standard is a tech stack of dead reckoning and GNSS technology that provides precise positioning from satellites and complements that data with inertial sensing to bridge gaps caused by signal errors or unavailability and augment navigation systems.
In other words, the combination of absolute and relative positioning produces more reliable navigation than either can provide alone.
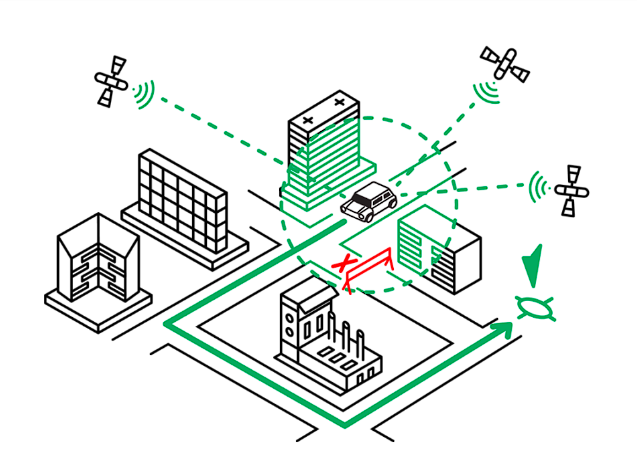
Combining relative and absolute positioning produces the safest and most accurate navigation.
Multi or dual-band solutions have greatly improved GNSS positioning accuracy and have become more accessible in the past few years. While there are many causes of GNSS positioning errors, multipath errors specifically occur when two signals travel different lengths from the transmitter to the receiver.
Dual-band solutions can better measure these discrepancies by tracking signal bands from multiple frequencies and derive more precise positioning. However, there are still many situations in which GNSS is insufficient, and dead reckoning is needed to fill in the gaps and provide additional context for the most accurate positioning.
Why you need dead reckoning for navigation
Despite continued innovation in the industry, sometimes GNSS just doesn’t cut it. Here are the top five scenarios when inertial sensing is needed to provide precise positioning to complement GNSS.
1. Dead reckoning can derive positioning information even during GNSS signal outages

The most common reason for using dead reckoning is to fill positioning gaps caused by GNSS signal outages. Outages occur when signals are obstructed and cannot reach receivers, such as when traveling through a dense urban environment or in a tunnel.
In these instances, inertial sensors provide highly accurate positioning information based on speed, direction, and altitude. Remember, though, there are a few different ways to implement dead reckoning in this situation. We wrote about them here so you can choose the method that best suits your particular use case.
2. Dead reckoning supports GNSS position estimation to improve data quality
Similarly, dead reckoning can augment positioning calculations when GNSS signal quality is poor. The same factors that can completely obstruct signals can also severely degrade their quality, and sometimes, even other sources of RF interference (think nearby cell towers or modems) can play a role.
Although signals may not be obstructed completely, making them technically usable for deriving location, this decreased quality can greatly impact positioning calculations. At these times, you can use data collected by inertial sensors (contained within Inertial Measurement Units) to estimate position better.
3. Collecting data with dead reckoning
An additional benefit of inertial sensors is their ability to continuously capture data specific to the vehicle or piece of hardware it is connected to. While it is possible to observe positioning history from GNSS and RTK data, dead reckoning solutions collect data about the unique movement of the object they are attached to, including speed, direction, altitude, and more.
While this data is primarily captured to fuel positioning calculations when GNSS fails, it provides the added benefit of showing movement history you cannot derive from GNSS signal data alone. You can use these insights to track driving behavior, autonomous vehicle (AV) performance, and similar trends.
4. Improving speed and affordability of position output with dead reckoning

Dead reckoning is also helpful for improving the rate at which position output is produced.
GNSS solutions are computationally expensive, usually occurring at 1 Hz or 10 Hz. Inertial measurements can occur at 100 Hz or higher and can dead reckon between GNSS updates to provide positioning data for geotagging cameras and complementing LiDAR or radar data.
These time and cost savings help scale positioning across geographies, use cases, and more.
5. Dead reckoning can provide protection against spoofing or signal jamming

Last – but certainly not least – inertial sensors provide foundational positioning information that can be relied on when GNSS signals are compromised. Unfortunately, today’s GNSS users must contend with the possibility of hackers jamming or spoofing their receivers.
While this is relatively rare for consumer positioning, large-scale GNSS commercial or intelligence applications must maintain a backup to avoid making critical decisions based on inaccurate information.
That’s where dead reckoning comes in; inertial sensors provide reliable positioning data free from outside influence to enhance the resilience of location-based technology.
Dead Reckoning Errors
Despite its usefulness, dead reckoning isn’t immune to inaccuracies. One common problem is sensor drift, where the sensors gradually accumulate errors over time, leading to inaccuracies in position and orientation estimation.
Environmental factors such as uneven terrain or sudden changes in speed can lead to discrepancies between estimated and actual distances covered. Integration errors can occur when combining data from multiple sensors, leading to inconsistencies in the calculated trajectory and position.
Fortunately, there are proven strategies to mitigate these issues. Regular calibration and realignment of inertial sensors can help reduce sensor drift and maintain accuracy over time. Incorporating redundant sensor systems or backup navigation methods can provide fail-safes in case of sensor failures or extreme environmental conditions.
Utilizing sophisticated filtering algorithms, such as Kalman filters, can also prevent integration errors and improve the reliability of navigation solutions.
However, no sensor, regardless of cost or quality, is immune to inaccuracy. Point One, the leading precision location platform across industries, provides alignment and calibration–doing the difficult, ongoing work for you.
Plus, with Point One Atlas, you get a complete, pre-integrated, scalable INS solution with real-time, centimeter-level accurate position with a simple plug-and-play configuration. By using the best sensor fusion algorithms, Atlas combines data from its own IMU, GNSS, Wheel odometry, and other sensors, ultimately providing the most accurate location available.
Embed: https://vimeo.com/895636378
Dead Reckoning Applications
On land, in the air, and at sea, dead reckoning is empowering precision positioning by supplementing GNSS data. Let’s take a look at various applications where inertial sensing is helping to generate enhanced navigational data.
Dead Reckoning Land Navigation
In autonomous vehicles, inertial sensors such as accelerometers and gyroscopes continuously measure the vehicle’s acceleration and changes in orientation. Tracking these measurements over time relative to a starting point calculates an estimation of the vehicle’s position and velocity, allowing it to navigate along predetermined routes or adapt to changing environments without relying solely on GPS.
Dead reckoning is used in military operations as well, where precision and reliability are paramount. Military vehicles, unmanned ground vehicles (UGVs), and soldiers equipped with navigation systems utilize inertial sensors to track their movements, especially in GPS-denied environments or during covert operations where maintaining radio silence is crucial.
Dead Reckoning Navigation in Aviation
Dead reckoning contributes to the safety and efficiency of modern air travel as well, especially during oceanic or remote area flights where conventional ground-based navigation aids are scarce, and GPS coverage may be intermittent or unreliable.
By incorporating dead reckoning calculations alongside other navigation data, flight management systems (FMS) can provide a seamless and continuous navigation solution, ensuring accurate position updates and route guidance throughout the flight. In flight, the FMS continuously updates the aircraft’s position by projecting its previous position forward based on its estimated velocity and heading, taking into account factors such as wind speed and direction to improve accuracy.
Dead Reckoning Navigation at Sea
Modern maritime navigation also leverages dead reckoning, allowing sailors to maintain course and ensure safe navigation even during ocean passages where frequent GPS updates aren’t available. Instruments like gyrocompasses, speed logs, and radar provide data on the vessel’s heading, speed, and distance traveled.
By integrating this data over time, navigators can estimate the vessel’s position and track its progress along a planned route.
More About Dead Reckoning for Navigation
Let’s take a look at a few more facts about dead reckoning.
Is there dead reckoning navigation software?
Technology that uses the principles of dead reckoning is often referred to as inertial navigation. The experts at Point One Navigation engineered a product that leverages the strengths of both Inertial Navigation Systems and GNSS data to produce a robust and reliable navigation solution.
More than software, the Atlas platform is built on advanced algorithms designed for sensor fusion, effectively combining INS’s continuous, independent tracking capabilities with the absolute positioning of GNSS.
How do you navigate by dead reckoning?
Navigation by dead reckoning involves continuously estimating your current position based on a previously known position, then updating it based on distance traveled and direction taken over time. This method relies on calculations of speed, time, and direction to approximate your position relative to a starting point.
Why do they call it dead reckoning?
The term “dead reckoning” originates from the nautical term “deduced reckoning” or “deductive reckoning.” Over time, it evolved into “dead reckoning.” Dead in this context means absolute or precise. Reckoning refers to the calculation or estimation involved in determining one’s position.
Therefore, dead reckoning signifies a precise calculation or estimation of position based on known factors, without relying on external references.
Do we still use dead reckoning?
Yes–it’s also known as inertial sensing. While the practice of dead reckoning looked different for explorers and mariners centuries ago, the principles are still applied in our modern navigation systems today.
Get started with high-precision dead reckoning for navigation and positioning
At Point One, we specialize in providing the most precise, affordable, and accessible positioning technology to power location-based applications worldwide. Our inertial navigation offerings implement our leading sensor fusion algorithms, enabling high-precision positioning for a wide variety of use cases.
Atlas and FusionEngine make it possible to build with robust position and navigation information easily and include this information into a product or system with minimal engineering effort.
Atlas uses a modern web UI and is equipped with on-device and ethernet based streaming of data.
You can learn more about the technical specs of our inertial navigation system here, including details about our tightly-coupled sensor fusion, centimeter-level accuracy, and open sky vs. urban performance metrics.
To get started with Point One’s automotive-grade sensors, purchase a dev kit or get in touch with our team of experts.