
GNSS works by measuring the range of satellites that broadcast their position in the sky. By precisely calculating where these ranges intersect, users can determine their position on earth down to a few meters. This has been the fundamental method for modern satellite based location since the first systems went online in the early 1970s. This technique works well in open sky environments because of direct line of sight to the satellites.
What causes inaccuracy in GNSS systems in urban settings?
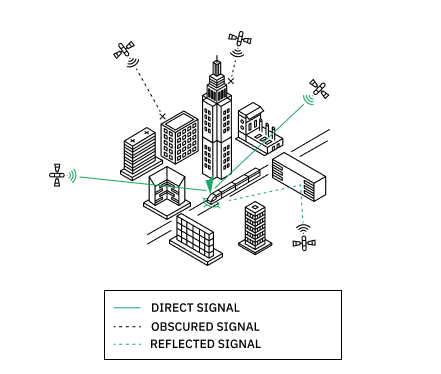
In cities, traditional GNSS systems struggle due to signal interference caused by buildings. The signals bounce off the structures creating errors in a process called multipath, distorting their accuracy like a bent tape measure. Consequently, the GNSS receiver must handle these erratic signals and often resorts to averaging them for display. As the receiver moves, the changing reflection angles further degrade the signal, leading to an unreliable and erratic plot. As a result, multipath error and its effects cause traditional GNSS signals to be inherently inaccurate in dense urban areas.
What is loose coupling?
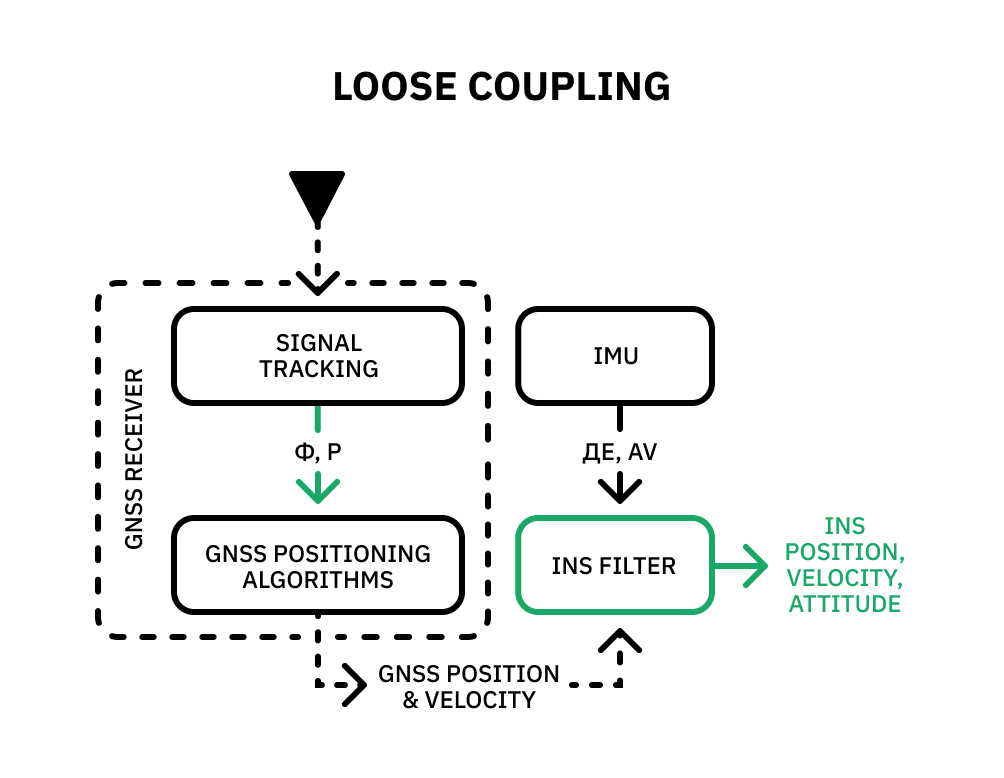
Some common strategies involve further averaging GNSS signals and incorporating the outputs of the IMU (Inertial Measurement Unit) and sensor fusion algorithms to enhance the navigation output. Sensor fusion algorithms take into account a collection of measurements along with their associated uncertainties. In the case of an Inertial Navigation System (INS), these measurements encompass parameters such as position, velocity, and attitude. Each parameter carries an uncertainty, which serves as an indicator of the algorithm’s level of confidence in that particular measurement.
This method is straightforward, easily implementable, and cost-effective. While it does lead to a slight improvement in the outcome, it isn’t ideal for all scenarios. This approach relies on a basic principle: when a device moves, it measures acceleration, subtracts the effect of gravity, integrates the remaining acceleration once to obtain velocities, and integrates again to determine position. However, the process of double integration combining the averaging of erroneous data from the GNSS system quickly introduces drift, and is commonly referred to as “loose coupling.”
What is tight coupling?

Another method, known as tight coupling, involves using measurements of aiding signal parameters to mitigate drift in an INS. In comparison to loose coupling, tightly coupled systems are able to update the error states of the INS, even when there is insufficient GNSS data to fix a position. This can happen when fewer than four GNSS satellites are visible, making it impossible to determine a position solution based solely on GNSS information.
In loosely coupled systems, this situation leads to a complete outage of the data. However, tightly coupled systems can make use of limited GNSS measurements, allowing for partial mitigation of the INS error drift. To achieve this, tightly coupled systems continuously calibrate the IMU in real-time, particularly when the GNSS signal is unobstructed. This calibration ensures accurate knowledge of the IMU bias and trains the IMU to anticipate the future location of the GNSS signal (anticipatory modeling). By allowing the IMU to assess the validity and accuracy of the GNSS signal and select the GNSS signal that aligns with its prediction, a tight coupling between the IMU and GNSS can be established.
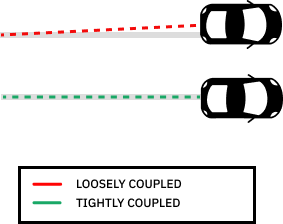
Essentially, loose and tight coupling differ based on the type of information shared between the individual systems. In loose coupling, a processed GNSS solution is merged with an INS solution; in tight coupling, raw GNSS measurements are combined with INS-predicted measurements. Tightly coupled systems require a sophisticated software design that may involve managing a large number of system data, which can be complex to manage. However, this complexity comes with the benefit of being able to extract valuable data from fewer GNSS satellites.By modeling observation errors on a per-satellite basis from calibrations, these systems significantly increase accuracy and reduce data down time.
PointOne successfully accomplished this feat while maintaining affordability, thereby making it accessible to the masses. Check out our dev kits to learn more and get started.