
Advancements in location technology have catalyzed fields from agriculture to surveying and automated vehicles. From inertial navigation systems to RTK technology, ultra-precise location information has unlimited applications. However, sensors can be faulty, which is why proper calibration for GNSS, INS, & RTK base stations is critical.
Calibration is a crucial aspect of eliminating errors present in sensors, especially when measuring these extremely small effects that are hard to detect. In this guide, we’ll dig into the intricacies of INS and RTK calibration, and how professional location services can ensure optimal location accuracy and navigation performance.
What is Calibration?
All sensors have blind spots. Take, for example, how autonomous vehicles (AVs) use both cameras and LiDAR data for navigation. Cameras don’t work when it is pitch black–but LIDARs actively illuminate objects using lasers, eliminating the need for ambient lighting.
Thanks to having multiple sensors working together, your car can work at all hours of the day. However, this only works because of the accurate calibration of all of these sensors.
Calibration involves the adjustment of sensors to eliminate errors and ensure accurate measurements. Think of a soccer player going to kick a goal: in the precise moment before he kicks, he is mentally calibrating the wind, his foot position, his speed, the ball, other players, and the goal–making a complex mental model that he can follow to ensure he makes the goal.
This is the universal process of calibration.
Why is proper calibration so important for location services?
There is no sensor in existence that’s immune to failure. That’s why, in location services, calibrating multiple sensors plays a vital role in mitigating inaccuracies caused by sensor imperfections or environmental factors. Without calibration, navigation systems may produce erroneous results, leading to potential safety hazards or operational inefficiencies.
For example, inaccurate calibration of sensors in autonomous vehicles, such as LiDAR, radar, or GPS, could lead to incorrect perception of the vehicle’s surroundings. This could result in the vehicle making incorrect decisions, such as failing to detect obstacles or misjudging distances, leading to accidents or collisions.
INS Calibration
An Inertial Navigation System (INS) is a system that integrates the capabilities of an Inertial Measurement Unit (IMU), which measures acceleration and rotation independently, with Global Positioning System (GPS) data. This combination allows for the determination of an object’s position, velocity, and orientation without relying solely on external references.
An INS system enhances accuracy and reliability, especially in environments where GPS signals may be weak or obstructed. For instance, INS can maintain functionality in tunnels or dense urban areas where GPS systems may falter.
Despite the advantages of INS, it’s important to acknowledge its inherent limitations. Small errors in acceleration and rotation measurements can accumulate over time, resulting in discrepancies in the calculated position.
To mitigate these inaccuracies, a comprehensive approach involves combining both absolute (GPS-based) and relative (IMU-based) navigation techniques. The integration of absolute and relative navigation is precisely what INS calibration achieves, ensuring optimal performance and accuracy in navigation systems.
How INS Calibration Works
INS calibration integrates sensor data from GPS and IMU to determine precise position, velocity, and orientation. It ensures that sensor measurements are aligned and accurate, especially considering factors like sensor offset and environmental conditions.
However, there are often multiple complicating effects making it difficult to calibrate the various systems. For example, if the acceleration of an AV is slightly off, this could be due to a slight rotation of the IMU–or it could be due to some manufacturing characteristic such as a slightly thicker metal. This myriad of conditions that can change the performance of the sensor understandably makes calibration difficult.
INS calibration requires taking a GPS receiver coupled with an IMU and comparing it with the physics of some sort of moving vehicle, like a car’s velocity, acceleration, and even factors such as tire pressure. During calibration, the system collects data from its sensors, which typically include accelerometers and gyroscopes, as well as other sensors like barometers and GPS receivers. These sensors measure accelerations, rotations, and pressure.
The collected sensor data is then analyzed to identify errors and inaccuracies, which can arise from sensor misalignment, bias, scale factor errors, temperature variation, or external disturbances. At this point, calibration algorithms are applied to the sensor data to estimate and correct for these errors.
Calibration is an iterative process. Adjustments are made, and then the system’s performance is reevaluated repeatedly to maintain accuracy.
INS Calibration vs Sensor Fusion
Sensor Fusion and INS calibration go hand-in-hand, with sensor fusion being a critical aspect of achieving better calibration. In short, Sensor Fusion involves creating models based on physics to predict and correct expected errors in sensor measurements.
Satellites provide a type of location information that no other sensor can: absolute location. All other sensors, from cameras on autonomous vehicles to LiDAR and radar, can only provide information relative to other things.
While absolute location information from these sensors is essential, it can be prone to error. We experience this error when waiting for an Uber in a busy city and the sensor doesn’t quite know where you’re standing because the satellites must deal with interference. Sensor Fusion corrects for this using relative information to help keep the absolute location correct as we move.
Another example is with autonomous vehicles. While autonomous vehicle collision numbers remain low, rear-end collisions do happen. Sensor fusion reduces rear-end collisions by using calibration to make all the sensors “line up”–helping to make the autonomous vehicle immune to the failure modes of any particular sensor system.
Another purpose of sensor fusion is to detect when a sensor is operating outside of its domain. Sensor fusion blends information from sensors and other devices, like cameras, and puts it all together to come up with a precise location.
The most advanced systems then cross-calibrate all of the different centers, like blending IMU and satellite data and incorporating other information like the camera on the AV. Sensor Fusion accounts for the fact that no sensor is immune to error, which means the best possible location data will use redundancies to detect and compensate for those errors in real-time.
Calibration is essential for extracting optimal performance from sensors, especially for mass production. Leading systems like those used by Point One combine sensor fusion with calibration to provide optimal performance and ongoing error correction–ultimately leading to the most precise location information possible.
INS Calibration vs INS Alignment
INS alignment refers to the process of initializing sensor measurements to establish the navigation system’s reference frame. Alignment is essential for determining the system’s initial position and velocity relative to a known or specified reference frame.
Alignment often involves integrating external positioning data such as GPS to align the system’s internal estimates with external reference points. Overall, the primary goal of INS alignment is to establish an accurate starting point for navigation operations.
Meanwhile, calibration is the ongoing adjusting and fine-tuning that sensors within INS require to maintain accurate measurements of position, velocity, and orientation. Calibration addresses factors such as sensor offset, scale factor, bias, and temperature variations to improve the accuracy and reliability of sensor data. Thus, while both calibration and alignment are essential for accurate navigation, calibration is an ongoing process.
New methods for alignment and calibration of INS provide the utmost location precision data. Point One provides alignment and calibration, doing the difficult ongoing work for you. With Point One Atlas, you get a complete, pre-integrated, scalable INS solution with real-time, centimeter-level accurate position with a simple plug-and-play configuration.
Learn more about Point One Atlas
RTK Calibration
RTK, or Real-Time Kinematic Positioning, is a highly specialized technique that revolutionized geospatial positioning by providing never-before-seen accuracy in real-time location data at the centimeter level. Standard satellite data is prone to errors and RTK positioning corrects those errors with exceptional precision.
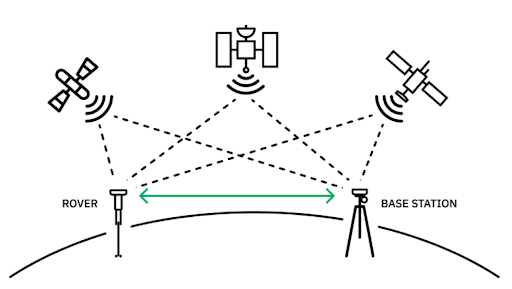
RTK positioning relies on communication between a rover and a base station. The base station’s position is known at the centimeter level, which allows for the unprecedented accuracy of the system overall.
The base station transmits observations to the rover receiver in real time. The rover is able to compare its own measurements to those of the base station, and then cancel out any errors in its own measurement. The accuracy achieved is hundreds of times greater than ever before. Continual sophisticated advancements like RTK corrections are now being used across various GNSS systems, including GPS, GLONASS, Galileo, and others.
The astounding success and accuracy of this entire process rely on calibration. RTK calibration is essential for achieving high-precision positioning because RTK is a relative location technology–meaning it’s only as accurate as your calibration of the base station.
RTK Base Station Calibration
In the world of RTK, the base station is paramount. It’s the baseline of the accuracy of your data. If the base station position is off by the meter, then the field devices will be off by a meter (or more). Let’s imagine that you’re building a bridge from two sides of a ravine. If all of your measurements are off by one meter, then the two sides of the bridge would never meet!
However, RTK base station calibration is challenging, complex, and labor-intensive. The art of calibration requires going into a system ahead of time and creating models of it based on physics.
Additionally, since all sensors are prone to error and precise location information is needed ongoingly, calibration is not a one-and-done process. It needs to be done continuously. This presents a problem. Humans are busy, and we’re also prone to error. In these complex systems and software, it’s very difficult to catch the problems as they happen.
This is why building your own RTK system isn’t worth it. Not only is it costly, but establishing your own base station requires known survey points for calibration to ensure the accuracy of your station’s corrections. The monitoring and ongoing, daily calibration of base stations and other devices is simply not feasible at scale.
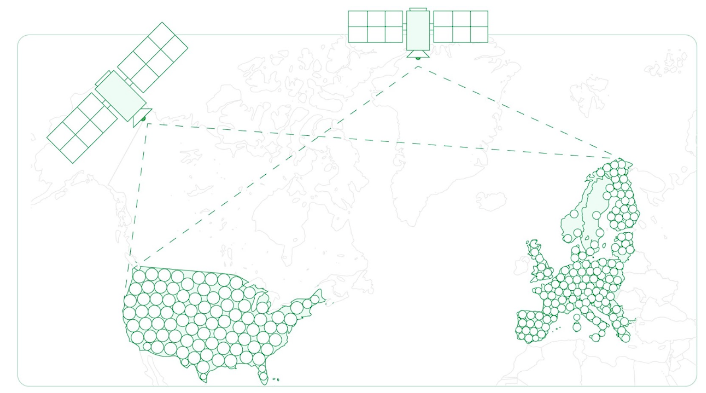
Fortunately, location precision solutions like Point One have done all the calibration and setup work for you. With over 1400 base stations across the US, EU, and AU, Point One offers complete coverage wherever you need it.
Point One regularly calibrates base stations to the millimeter level. Unlike a build-your-own solution, the base stations are permanently installed, so the team can take days of data and figure out where the offsets and errors are over time.
GPS RTK Calibration
Not only is it essential to calibrate the base station, but RTK calibration is also needed with the satellite signal it is correcting. RTK corrections can be applied to any satellite signal, from GPS to GLONASS to Galileo and beyond.
Let’s take GPS as an example. Achieving accuracy in GPS relies heavily on calibration. RTK serves as a method to mitigate common errors present in satellite signals by calibrating each stage of the signal’s journey from space to the Earth’s surface.
This calibration process encompasses accounting for the effects of various atmospheric layers and compensating for discrepancies introduced during signal transmissions to the GPS receiver antenna.
The final stage involves calibrating the antenna’s response curve, particularly focusing on phase center variations that may result in varying distances between the antenna and the satellites depending on the angle of the incoming waveform.
Despite GPS systems claiming accuracy down to the centimeter level, the actual accuracy depends on the antenna’s precision, which averages around 2-3 centimeters for commercial-grade antennas. Thus, it’s imperative to evaluate whether the stated accuracy aligns with the antenna’s true performance.
Rather than worrying extensively about purchasing extremely expensive, state-of-the-art devices, you can access highly accurate sensors at an affordable price point through the Point One network.
How to Simplify INS & RTK Calibration
Calibration is an incredibly daunting process to attempt to master on your own. Not only that, but it’s a continuous process that is never truly done. From INS calibration to RTK calibration, it is impossible to catch every problem as it’s happening.
This is where Point One steps in.
Calibrating INS
Rather than paying for expensive INS sensors with clunky post-processing workflows, Point One does the calibration legwork for you. Once the item is installed and calibrated in its final resting place, Point One provides continuous ongoing calibration using Sensor Fusion, which blends information from multiple sensors to detect when something is going wrong.
Point One’s Atlas INS combines best-in-class hardware with RTK and sensor fusion to provide unparalleled location precision. By using the best sensor fusion algorithms, Atlas combines data from its own IMU, GNSS, Wheel odometry, and other sensors, ultimately providing the most accurate location available.
Calibrating RTK
Calibrating RTK can be laborious, from the critically important initial calibration of the base stations to the ongoing calibration of both base stations and GPS. Since Point One’s base stations are permanently installed, there’s a high level of precision and oversight to determine where the offsets and errors are.
The position of the base stations is monitored and redone daily, providing a level of accuracy that simply isn’t possible to achieve on your own.
More About RTK & INS Calibration
RTK and INS Calibration is a dense and sophisticated process. Let’s review a few of the basics to ensure a comprehensive understanding of these crucial processes.
How accurate is RTK correction?
RTK correction achieves high accuracy, down to centimeter-level precision, by correcting for errors in satellite signals using reference stations and differential positioning techniques.
What does RTK mean in GPS accuracy?
RTK, in the context of GPS accuracy, stands for Real-Time Kinematic, indicating the capability to provide precise positioning in real time by continuously correcting for errors in satellite measurements.
What is the distance for RTK correction?
The distance for RTK correction varies depending on factors such as terrain and signal obstructions but typically extends up to several kilometers from the base station.
What does IMU calibration mean?
IMU calibration involves adjusting and aligning the Inertial Measurement unit’s sensors to account for biases, misalignments, and environmental factors, ensuring accurate measurement of acceleration, angular rates, and orientation.
How do I set up IMU calibration?
Setting up IMU calibration involves placing sensors in a controlled environment, performing specific motions or maneuvers to generate calibration data, and using calibration software or algorithms to estimate and apply correction parameters to the IMU measurements. If this sounds challenging, turn to the experts at Point One who do all of this for you at an affordable price point.
Access the Ultimate Location Precision Tech Stack
Achieving the highest level of location precision demands a robust tech stack equipped with accurate calibration processes for both INS and RTK systems. With Point One Navigation, this level of precision is made effortless. The comprehensive calibration procedures, including ongoing base station calibration, ensure that your location data is consistently accurate down to the centimeter.
By leveraging Point One’s expertise and cutting-edge technology, developers can confidently build applications that rely on precise positioning data for navigation, automation, and beyond.
Choose Point One for the ultimate location precision tech stack.