
Global Navigation Satellite System (GNSS) technology has drastically changed how humans and machines navigate. An important component of this technology is GNSS corrections. They improve positioning data, fueling innovation behind various applications and products.
Today, GNSS correction methods are vital in determining precise locations and optimizing routing for many scenarios, such as autonomous vehicle navigation, robotics, logistics fleets, and emergency response systems.
However, GNSS signals often encounter atmospheric and technological challenges that require correction after being transmitted from satellites. To address these challenges, a range of GNSS correction services are available, each tailored to counter specific inaccuracies and prevent errors in GNSS-powered solutions.
This article from Point One Navigation contains everything there is to know about GNSS corrections, including the strengths and weaknesses of the top GNSS correction methods. This guide can help developers and users select the most appropriate GNSS correction services for their unique needs.
What are GNSS Corrections?
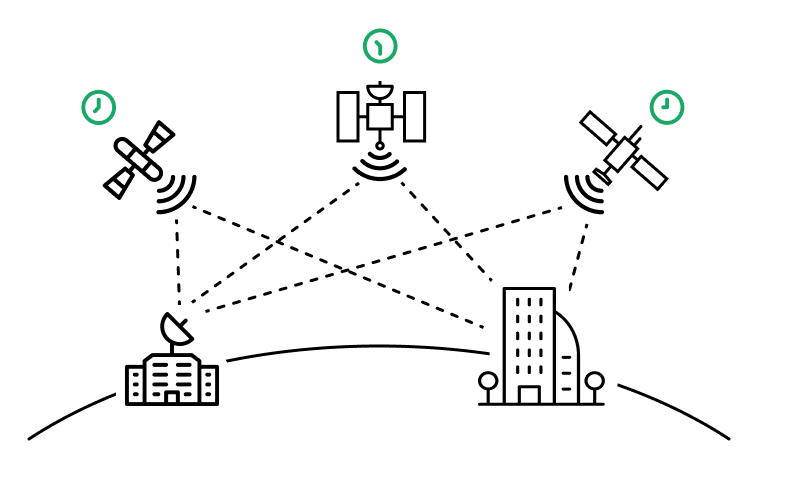
GNSS (Global Navigation Satellite System) is a sophisticated navigation technology that uses satellites for accurate global positioning and timing information. This system operates through continuous satellite communication with ground control stations and GNSS receivers.
Satellites transmit signals containing data about their positions and precise time; GNSS receivers intercept and interpret this data.
How does GNSS work?
To pinpoint its location, a GNSS receiver captures satellite signals and calculates their travel time. Utilizing the speed of light as a constant, the receiver computes the distance between itself and each satellite. It identifies its precise position on the Earth’s surface by combining distance measurements from multiple satellites.
The simplest GNSS receivers, such as those in smartphones and basic handheld units, can acquire basic positioning information directly from GNSS satellites (within a few meters).
However, errors in the GNSS equation, like clock and orbit inaccuracies, ionospheric and tropospheric disturbances, and code biases among satellite systems, can impact accuracy.
GNSS vs GPS Corrections
GNSS corrections are adjustments made to counter errors in various GNSS constellations. Although GPS (Global Positioning System) is a specific constellation within the GNSS framework, the correction methods apply similarly across other GNSS systems, including GLONASS, Galileo, and BeiDou.
Point One Navigation’s GNSS correction services work with all known constellations, ensuring enhanced accuracy regardless of the specific satellite system. These corrections are vital for high-precision applications, transforming GNSS data from a general estimate to cm-accuracy positioning.
Reasons for GNSS Errors
Ephemeris inaccuracies, discrepancies in satellite clocks, ionospheric disturbances, tropospheric conditions, and biases among various satellite systems can cause errors in GNSS signals. Understanding these challenges is essential when choosing a correction method for a particular application or product.
Ephemeris data errors
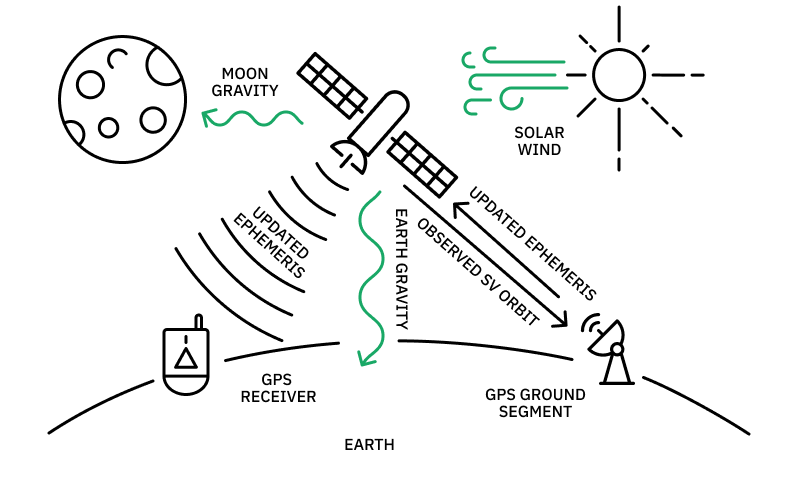
Many factors contribute to ephemeris data errors, which must be corrected for precise positioning.
Ephemeris data, an input GNSS uses to calculate location, is information about a satellite’s orbital parameters and position in space. When ephemeris data is inaccurate, it can impact the accuracy of GNSS positioning calculations that determine the satellite’s location – and, as a result, the receiver’s position on Earth.
If the GNSS lacks precise knowledge of the satellite’s actual position or uses incorrect location information, the intersection of signals will not align correctly. As a result, the accuracy of the position and signal transmission/reception time will be compromised, leading to less accurate results.
Satellite clock inconsistencies
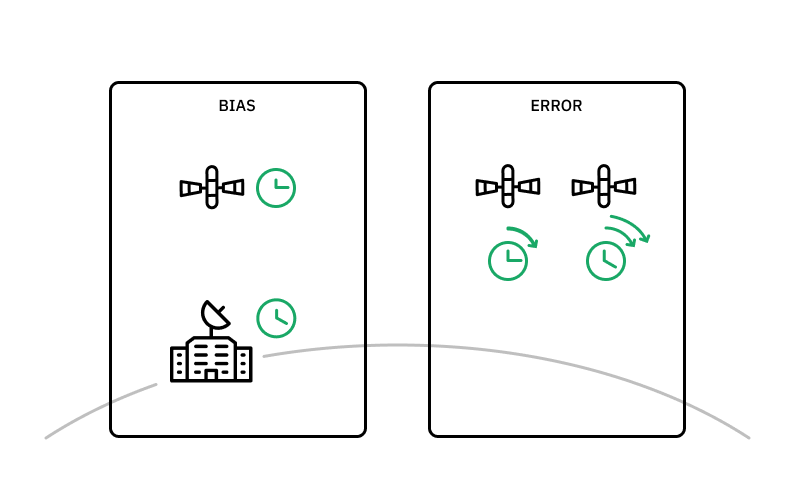
Major positioning inaccuracies can result due to minor differences in atomic satellite clocks.
GNSS satellites are equipped with highly accurate atomic clocks, but these clocks aren’t free from sources of error. Over time, subtle variations in the clock rate can introduce significant timing errors. The speed at which GNSS satellites travel, reaching approximately 7,000 mph, introduces relative differences in time on the ground and in space – these are predictable.
There are also other errors which are random. Although the ground control station attempts to correct for both predictable and random variability in clock rate, these updates only occur every few hours, and clock error inconsistencies occur.
Accurate distance measurement in GNSS requires precise clock synchronization because GNSS receivers use these timestamps to calculate their distance from a satellite. Any discrepancy can lead to substantial positioning errors, directly affecting the receiver’s perception of the time the signal takes to travel from the satellite to Earth.
Ionospheric conditions
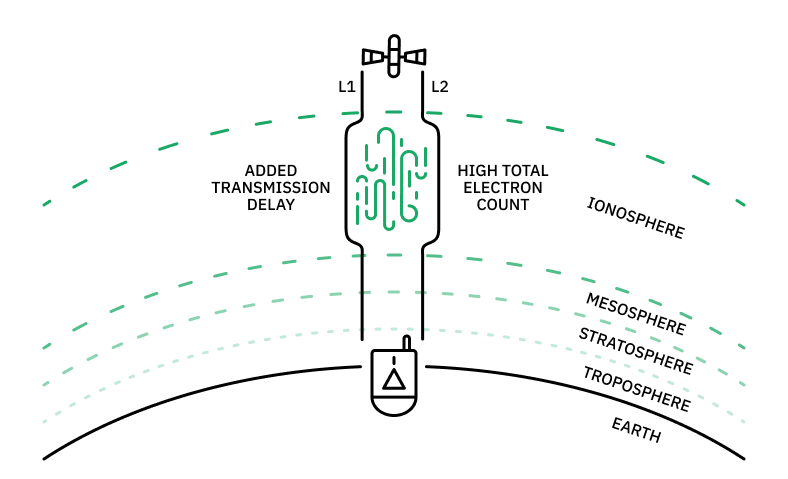
Charged particles in the ionosphere must be accounted for in positioning calculations due to their impact on GNSS signals.
The ionosphere constitutes a layer in the Earth’s upper atmosphere composed of charged particles that influence the speed of light and radio signals. Fluctuations in solar radiation and other conditions can delay or distort GNSS signals, resulting in measurement errors that need correction to achieve accurate positioning on Earth.
Although the ionosphere’s impact can cause significant errors in signal interpretation, these errors can be effectively modeled and corrected from a relatively large distance. With the right technology, the adverse effects of the ionosphere can be mitigated in GNSS signal calculations.
Tropospheric conditions
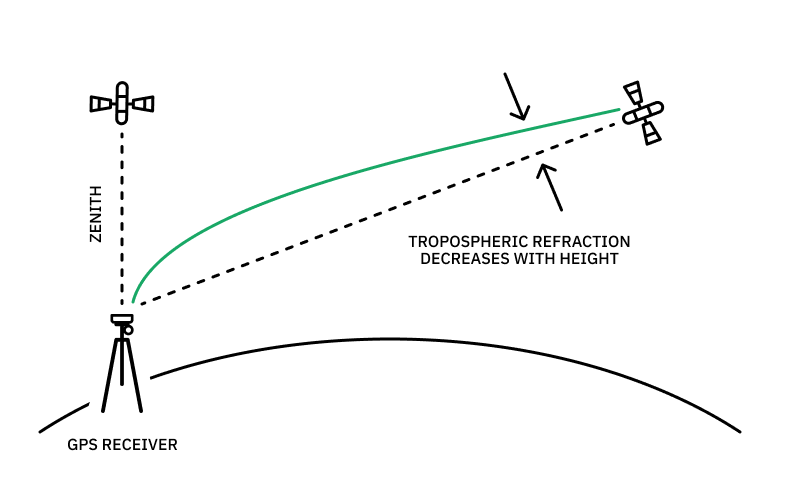
Tropospheric elements must be corrected from a close distance because of their hyper-local impact on GNSS signals.
The troposphere, the atmospheric layer responsible for weather phenomena, is another factor that can influence GNSS signals. Fluctuations in temperature, humidity, and atmospheric pressure within the troposphere can lead to errors in GNSS measurements by modifying the speed of light and any subsequent signal interpretation.
While these tropospheric effects have a milder impact on signal interpretation than other factors, they are highly localized and require modeling and correction from a relatively close distance.
Code bias and group delay
Disparate time references and frequencies from various satellites can contribute to inaccurate positioning calculations.
It’s worth noting that GNSS satellite systems are operated by various countries and organizations, each utilizing a distinct time reference and frequency. The disparities between signals originating from these various satellite systems, known as code bias or group delay, can also give rise to errors in signal measurement and impact the accuracy of GNSS positioning.
GNSS Correction Methods for High Accuracy Positioning
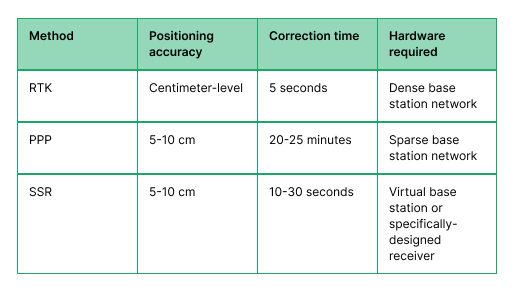
When deciding on a GNSS signal correction method, understanding these sources of error and their impact is critical. RTK, PPP, and SSR all have their own advantages and disadvantages, so knowing their specific methodologies can optimize particular objectives.
Uncorrected GNSS Signals
Uncorrected GNSS, such as those in simple devices like phones or basic handheld units, can be imprecise, often taking time to determine a position accurately. These systems perform ranging using satellite signals, but the accuracy can vary significantly without augmentation, usually within 1 to 20 meters.
The primary sources of error in uncorrected GNSS include inaccuracies in satellite clock and orbit data (ephemeris), ionospheric disturbances, and tropospheric conditions. These factors contribute to a delayed ‘time to first fix’ (TTFF), affecting how quickly a receiver can establish an accurate position.
Expected Precision: 1m–20m
Pros:
- Free
- Widely accessible
Limitations:
- Imprecise positioning data
- Slow TTFF
- Susceptible to multipath errors
- Limited functionality in challenging environments
- No protection against signal spoofing or jamming
Most ideal for: General, non-critical applications where high precision is not required.
Less ideal for: Professional and industrial applications requiring high accuracy.
RTK (Real-Time Kinematic)
RTK requires an extensive network of base stations across a large geographic area but results in efficient and highly precise GNSS signal corrections.
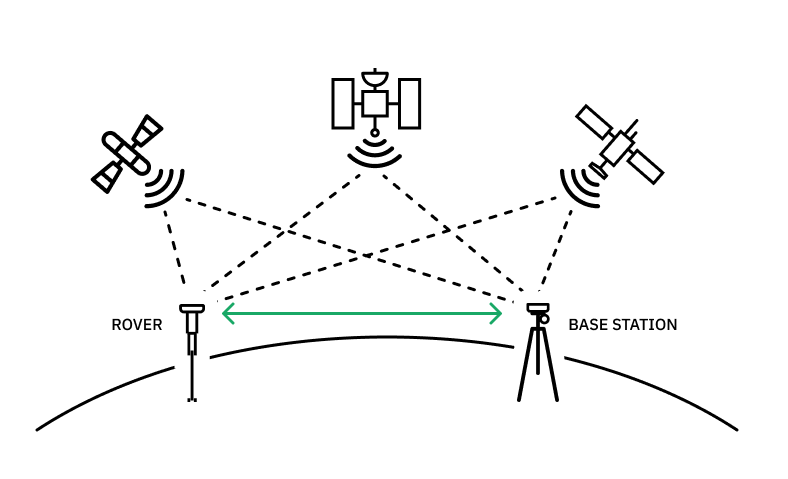
RTK correction is widely considered the gold standard in high-precision GNSS signal correction. This approach involves setting up a base station near the target area (typically within 30-50 kilometers). The base station then transmits a reference signal to the GNSS receiver, enabling precise positioning calculations. Many of the previously mentioned signal effects have minimal impact because the reference signal and receiver are physically close.
Calculating the positional discrepancy between the reference station and the GNSS receiver is possible by comparing these subtle signal differences. Given the high accuracy of the reference station’s position, adding this discrepancy to the reference station’s coordinates results in extremely accurate GNSS receiver positions. Any signal inaccuracies can be corrected by measuring the difference between the reference station position and the GNSS receiver.
Despite its reputation for remarkable precision, the primary setback of classical RTK solutions–or the option of building your own–lies in the need for an extensive network of base stations to facilitate global-scale signal correction. Establishing and maintaining such a dense infrastructure can quickly become cost-prohibitive for some organizations.
However, if you partner with an RTK network like Point One Navigation, this is all done for you. The Point One Polaris network has global coverage across the US, EU, UK, CA, and AU. With the highest overall density of U.S. corrections networks and extra redundancy in urban centers, Polaris provides high-accuracy GNSS corrections with a 99.99% uptime.
Expected Precision: Centimeter-level accuracy.
Pros:
- Real-time corrections with high precision.
- Minimizes the impact of common signal disturbances.
- Provides centimeter-level accuracy.
- Ideal for environments where precise positioning is critical
Limitations:
- Relies on proximity to base stations.
- Less effective in remote areas without dense infrastructure.
- Initial setup and calibration may require technical expertise.
Most ideal for: Autonomous vehicles, damage prevention, robotics, and consumer navigation in developed areas.
Less ideal for: Positioning applications in remote areas.
PPP (Precise Point Positioning)
PPP works at a much slower speed than other solutions to create accurate signal corrections.
PPP uses a limited number of highly precise and accurate stations for signal correction. The PPP algorithm divides the correction calculations between these stations and GNSS receivers.
PPP stations model known error sources within the GNSS system, including ephemeris inaccuracies, clock discrepancies, and group delay.
This information is then transmitted to GNSS receivers, which perform further calculations based on local conditions to close the error gap. By combining the signal data collected over time with the known error sources from PPP stations, GNSS receivers measure both universal and localized errors (such as ionospheric and tropospheric effects), ultimately determining the necessary signal corrections.
While PPP offers exceptional accuracy, the scarcity of PPP stations leads to slower signal correction times. For instance, signal correction may take about 20-25 minutes (compared to a matter of seconds with other methods).
Correction may take even longer in extremely challenging conditions, as the receiver needs to calculate both ionospheric and tropospheric effects independently.
Expected Precision: High accuracy, but generally less than RTK.
Pros:
- Global coverage.
- Not limited by proximity to reference stations.
Limitations:
- Slower to achieve full accuracy, taking longer for signal correction.
- Extended correction time in challenging conditions.
- Not suited for instantaneous needs.
Most ideal for: Heavy equipment or similar applications that can wait for accurate positioning information or operate in areas where an RTK or NTRIP service may not be possible, like in water or remote locations.
Less ideal for: Consumer GNSS, autonomous vehicles, and other applications requiring instantaneous positioning information.
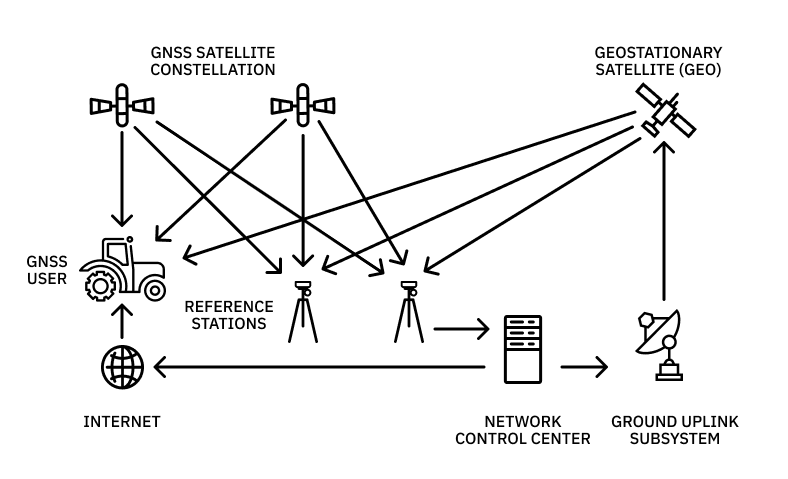
State space representation (SSR) or PPP-RTK
SSR is the latest innovation in signal correction and delivers precise corrections at a relatively high speed.
SSR is the latest innovation in signal correction and represents the forefront of GNSS technology. It provides essential data like ephemeris, clock, and code bias discrepancies, similar to what PPP offers, and information about localized ionospheric and tropospheric interferences.
However, a significant challenge is that many GNSS receivers are not equipped to effectively process all the data provided by SSR, making it difficult to convert it into meaningful positions. SSR data can be transformed into a virtual base station (VBS) to address this issue. Essentially, this VBS simulates an RTK base station for conventional receivers, allowing them to interpret SSR data.
This approach enables the broader adoption of SSR and makes high-precision positioning more accessible to a wider range of GNSS receivers.
Expected Precision: Comparable to RTK in many scenarios.
Pros:
- Combines the advantages of RTK and PPP.
- Offers detailed corrections, including local atmospheric conditions.
Limitations:
- Requires receivers capable of processing complex SSR data.
- Integration can be challenging.
- Not as readily accessible or user-friendly for all users.
- Initial setup and calibration are more complex.
Most ideal for: Automotive and robotics scenarios or users with low-level access to the GNSS hardware that can integrate the needed support software.
Less ideal for: Teams using generic receivers.
How to Select the Right GNSS Correction Services
With a range of GNSS correction services available, understanding the nuances of each option is key to making an informed choice. The selection process involves assessing coverage density, accuracy, support for various protocols, constellations, frequencies, and the provider’s expertise and security measures.
Density & Accuracy
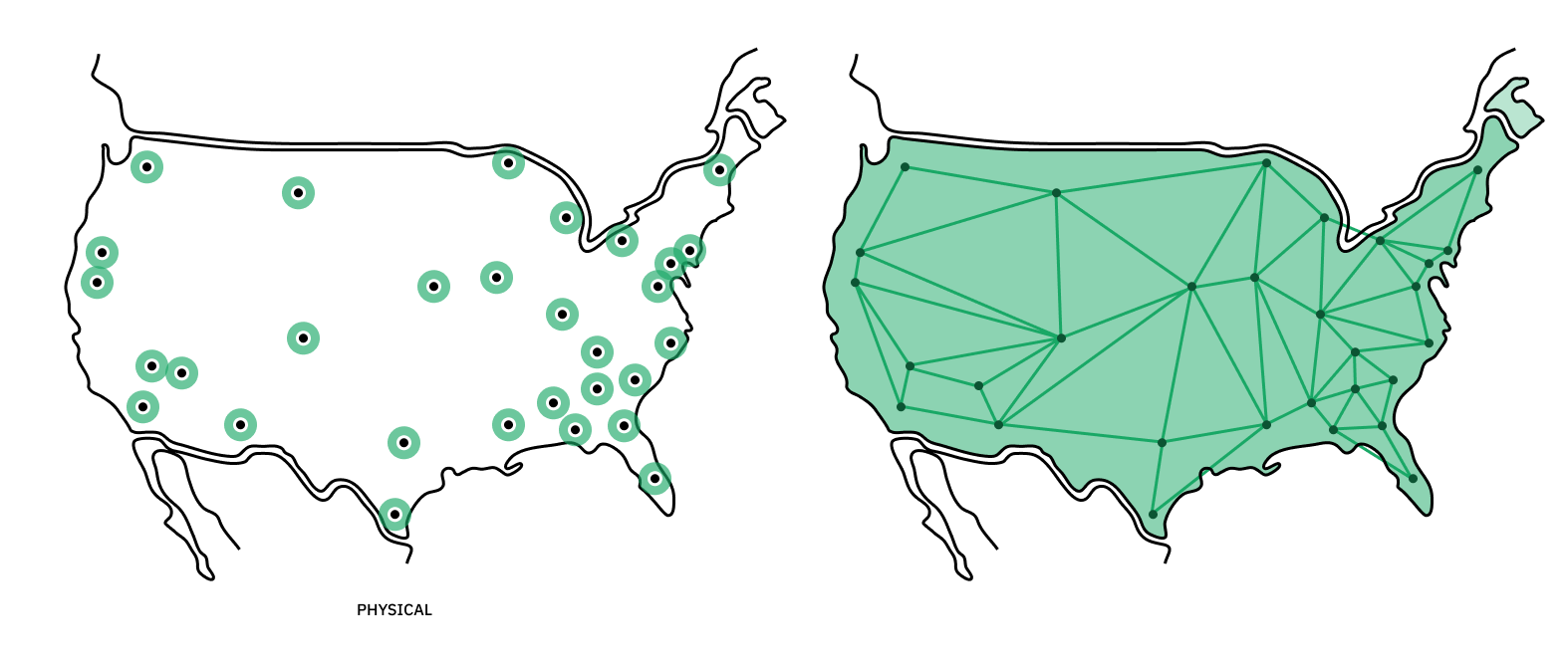
The density of a GNSS correction service’s network and its accuracy capabilities are fundamental. A denser network of ground control stations can offer more precise and reliable corrections, especially in challenging environments.
Accuracy, measured in positional precision, is vital for applications requiring centimeter-level accuracy, such as surveying or autonomous vehicle navigation.
Protocol, Constellation, & Frequency Support
Compatibility with various protocols, satellite constellations, and frequencies is another crucial aspect. RTK services that support multiple constellations (like GPS, GLONASS, Galileo, and BeiDou) and various frequencies provide more robust and consistent corrections.
The ability to work with different protocols ensures flexibility and wider application use.
Professionalism & Security
The GNSS correction service provider’s professionalism and commitment to data security are also key. If you’re scaling a business that requires location precision down to the cm, you need a professional, reliable partner that prioritizes security and manages and maintains all aspects of the service so you never have to deal with downtime.
Expansion Opportunities
Consider the potential for future expansion and adaptability of the service. As GNSS technology evolves, the ability of the correction service to adapt and incorporate new advancements is critical for long-term utility and value.
Types of RTK Correction Services
Each method for correcting GNSS signals offers different levels of precision and suitability for specific applications. However, the rising demands of organizations seeking the highest precision in their positioning requirements mean all correction methods must be scalable, efficient, and accurate.
Point One operates an extensive network of more than 1,440 global base stations, with over 900 in the US alone. This network continues to expand regularly in response to user demand, ensuring the delivery of centimeter-level GNSS signal corrections wherever required, including areas without cellular coverage.
Leveraging this robust network, Point One has developed a comprehensive suite of GNSS correction products, catering to the diverse needs of various organizations. These offerings range from classic RTK to SSR and everything in between, enabling users to choose the most suitable solution to achieve precise positioning.
Polaris RTK
Point One’s Polaris RTK solutions provide developers with high-precision GNSS signal corrections without needing to manage their own base stations. Using any RTK-compatible GNSS receiver, centimeter-level corrections can be achieved within seconds, providing rapid and accurate positioning data for applications that demand speed and precision.
Positioning accuracy: Centimeter-level.
Correction speed: <5 seconds
Receiver required: Any RTK-compatible receiver
Polaris SSR
Polaris SSR solutions from Point One merge their vast network of global RTK base stations with cutting-edge SSR technology, bridging the gaps that typically require the creation of a VBS. The world’s most comprehensive RTK network can be utilized with any RTK-compatible receiver, allowing 5-10 centimeter corrections in under 30 seconds.
This speed is over 80 times faster than traditional PPP solutions, delivering highly efficient and precise positioning capabilities.
Positioning accuracy: 5-10 centimeters
Correction speed: < 30 seconds
Receiver required: Any RTK-compatible receiver
Learn more about Polaris SSR
Polaris VBS
Point One’s Polaris VBS solutions empower generic receivers to make accurate signal corrections for teams unable to set up their own VBS but are looking for a blend of traditional and cutting-edge technology.
Point One’s VBS network communicates with any GNSS receiver to make 5-10 centimeter level corrections in approximately 15 seconds. This makes it ideal for teams looking to improve speed with a legacy receiver.
Positioning accuracy: 5-10 centimeters
Correction speed: <15 seconds
Receiver required: Generic receiver
Learn more about Polaris VBS
More About GNSS Corrections
GNSS corrections encompass a range of processes and considerations crucial for accurate positioning data. These corrections address inherent GNSS signal inaccuracies and are vital for various applications that depend on precise location information.
How do I correct my GNSS data?
Correcting GNSS data involves using augmentation systems like RTK, PPP, or SSR; these systems provide additional information to counteract the inaccuracies in GNSS signals. This correction process can be performed in real-time (as with RTK) or through post-processing, depending on the system and application requirements.
Users select a correction method that aligns with their specific needs, considering factors like the required level of accuracy and operational constraints.
What is a GNSS fix?
A GNSS fix refers to the process by which a GNSS receiver calculates its position by acquiring signals from multiple GNSS satellites. The accuracy of this position fix can vary, ranging from meter-level precision in standard GNSS to centimeter-level accuracy in systems using advanced correction methods.
What are GNSS errors?
GNSS errors are inaccuracies in the positioning data caused by various factors, including satellite clock discrepancies, orbital errors, atmospheric conditions (ionospheric and tropospheric effects), and signal multipaths.
These errors can significantly impact the reliability of GNSS data if not properly corrected.
What do GNSS corrections cost?
The cost of GNSS corrections varies depending on the service type and the accuracy level required. Free GNSS correction services offer basic improvements, while paid services like RTK and PPP provide higher precision at a cost.
The investment in advanced GNSS correction services is often justified by their significant value in accuracy and reliability, especially in professional and industrial applications.
Access Best GNSS Corrections Software Systems
GNSS signal correction methods have significantly transformed to keep pace with rapid technological advancements. This evolution has led to the development of more sophisticated and user-friendly correction solutions, enhancing accuracy and reliability across various applications.
Point One Navigation offers a comprehensive suite of GNSS correction solutions that cater to the diverse needs of developers and professionals. Our solutions are designed to empower the creation of location-based applications and products with unparalleled, cm-accuracy precision.
Contact one of our experts to learn how Point One Navigation’s GNSS correction solutions can elevate your project or application.