
WGS84 vs. NAD83 vs. ITRF 2014: What are the differences?
Geodetic reference datums are central to geospatial positioning applications such as Global Positioning System (GPS) and Geographic Information Systems (GIS), forming the foundation for geospatial mapping and inertial navigation systems. The first of these reference datums, the North American Datum of 1927 (NAD27), was published in the 20th century, but since then, datums have been continuously upgraded and improved.
This article will comprehensively examine WGS84, NAD83, and ITRF2014. We’ll explain how each one works, how they can transform into one another, and why they’re important for anyone working in location precision.
What are WGS84, NAD83, and ITRF2014?
WGS84, NAD83, and ITRF2014 are all reference datums used for geospatial positioning and navigation. Their origins are at the center of the Earth’s mass, making them geocentric datums.
The WGS84, NAD83, and ITRF2014 datums also serve as standards for geodetic measurements and spatial reference systems.
What are Datums?
Datums are the pillars of coordinate reference systems. They reference surfaces on the earth, turning an abstract idea into a location on its surface. Datums usually reference sea levels and land elevations. However, there are other reference surfaces; the one your datum will use will depend on where you are and what you are measuring.
Datums, as simple as they seem, are the reason we have access to accurate coordinates for GPS devices such as smartphones and the reason we know things like sea levels, land elevations, and distances.
Generally, there are two types of datums: horizontal and vertical. A Horizontal datum collects information on specific positions on the earth's surface, while a vertical datum collects information on land elevation (height) and water depth. So, you can say horizontal datums use latitude, while vertical datums use altitude.
There are also other classifications of datums such as geodetic datums, geometric datums, and geocentric datums. These just describe the datum's purpose. For instance, a geodetic datum just refers to the datum’s geoid being used as a reference surface, while a geometric datum describes the geometric shape of the reference surface, such as an ellipsoid, and a geocentric datum has its origin as the earth’s center of mass.
What are Spatial Reference Frames?
{kind=link}
To understand what spatial reference frames are, we have to first describe reference frames. Reference frames are basically the same as datums; they provide coordinates of select points.
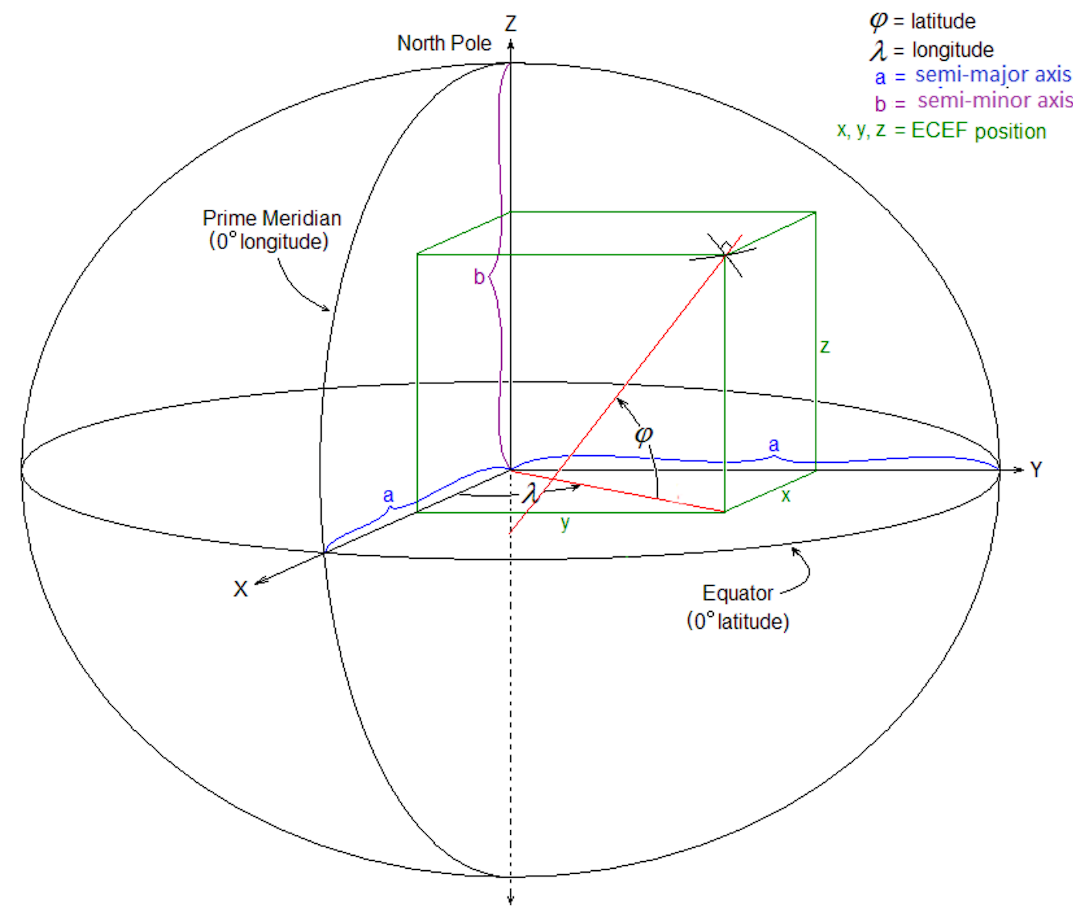
Reference frames are grouped into two classes: terrestrial reference frames such as WGS84 and NAD83 and spatial reference frames such as ECEF (Earth-Centered, Earth-Fixed) and ENU (East, North, Up).
But while terrestrial reference frames like ITRF provide coordinates of some points on the earth's surface, spatial reference frames define positions relative to a fixed point in three-dimensional space, consisting of X, Y, and Z coordinates.
They represent locations within the Earth, including the earth’s surface, atmosphere, and even outer space. Spatial reference frames are used in various applications, such as satellite navigation and earth deformation tracking. They track satellite orbits, model movements of tectonic plates, and enable precise positioning for spacecraft and satellites.
NAD83 Overview
NAD83 is a terrestrial reference frame and is the standardized geometric datum in North American countries. The datum originates from the Earth’s center of mass as a geocentric datum and is also based on the Geodetic Reference System of 1980 (GRS80), an ellipsoid that accurately approximates the Earth's shape and size.
The NAD83 version was a spectacular advancement compared to the previous NAD27. It facilitated the integration of satellite technology into geospatial applications and offered 1m accuracy. Unlike NAD27, which was only for location services in the United States, NAD83 works for all North American countries from the U.S. to Canada, Mexico, and Central America.
Currently, NAD83 is being used in inertial navigation applications for more precise positioning, GNSS corrections for satellite-based navigation systems and construction surveying for accurate measurements and alignment.
It’s been realized five times in a re-adjustment process to improve its accuracy over time.
NAD27
NAD27 preceded NAD83. It was the second geodetic datum introduced for surveying and mapping, and it is based on the Clarke Ellipsoid of 1866—a reference ellipsoid for NAD27. NAD27 was initially perceived as a geodetic datum that originates at the Meades Ranch in Kansas.
However, over time, it was discovered that it takes a fixed position on the earth’s tectonic plate so even when the tectonic plate moves, it doesn’t move, making it a local reference frame rather than a geodetic reference frame.
Also, this means that the further you move from Kansas, the lower your accuracy will be. So, there was a need for improvement, which necessitated several NAD updates.
NAD83 Updates
There have been at least five new realizations of NAD83 since its first release:
HARN
HARN stands for High Accuracy Reference Network. This NAD update was introduced in the 1990s after state-by-state adjustments of NAD83 were completed. The HARN update is the first upgrade of NAD83, and it focused on increasing accuracy with a 3D system instead of the existing horizontal, longitude-latitude system.
By introducing fixed height poles, NAD 83 HARN provided a vertical component to the previously two-dimensional data, enabling more precise elevation measurements.
HPGN
Just like HARN, The HPGN (High Precision Geodetic Networks) was introduced to rework preceding geodetic datums and increase accuracy. The HARN and HPGN are so similar in many contexts that it was decided to form a single acronym for them: HARN.
So whether you’re referring to high-precision geodetic networks or high-accuracy reference networks, they are both NAD 83 HARN.
CSRS
The Canadian Geodetic Survey (CGS) is a newer version of NAD83 called the Canadian Spatial Reference System (CSRS). The CSRS defines longitude, latitude, altitude, gravity, and location in Canada and is managed by the CGS.
With the introduction of the CSRS, NAD83 became NAD83(CSRS), a space-based and 3D dynamic realization as opposed to the original horizontal realization.
CACS
The Canadian Active Control System (CACS) , was created in the 1990s to track GNSS satellites used to compute GNSS orbits and clock products to control surveys. This sparse network of control stations provides precise positioning services across Canada, supporting a wide range of applications, including mapping, navigation, and geospatial data collection.
CORS
The continuously operating reference stations (CORS) realization of NAD83 introduced the use of permanently working GPS receivers.
With CORS's introduction, we now had GNSS receivers and antennas that could transmit high-accuracy RTK correction to users for high-precision positioning. Surveyors could also access GNSS correction services, a significant geodetic technology advancement.
However, today’s RTK networks, like Point One’s Polaris, have now eclipsed CORS in accuracy, reliability, and portability.
NSRS
The NSRS (National Spatial Reference System) is just like the CSRS in Canada. It defines longitude, latitude, altitude, gravity, and location in the United States. The NSRS is managed by the NOAA’s (National Geodetic Survey).
NSRS also includes permanently marked points (brass, bronze, or aluminum disks), the most recent national shoreline, and accurate models such as geoid, ellipsoid, and atmospheric refraction that affect spatial measurements.
When to Use NAD83
NAD83 should be used for mapping, surveying, and basically all georeferencing activities in the United States, Canada, Mexico, and Central America, as it provides accurate coordinates aligned with the North American continent's tectonic plate movements and geodetic network.
WGS84
With the mainstream use of global positioning systems (GPS), there became a need for a global datum to serve as a reference system, just like the GCS (Geocentric Coordinate System) for satellite navigation systems. This global datum is the world geodetic system of 1984, and it was developed by the US National Geospatial-Intelligence Agency.
WGS84 defines the Earth model from a mathematical perspective and comprises different elements. These include an ellipsoid that approximates the Earth's shape, a horizontal datum that establishes a standard for latitude and longitude, a vertical datum that defines the reference surface for altitude (height), and a coordinate system for mapping and collecting data.
The WGS84 works well with GPS applications and is also used in GPS-enabled devices such as robots, drones, and cars, as it produces more accurate results due to its geodetic nature.
WGS72
WGS 72 stands for World Geodetic System of 1972, a geocentric datum designed by the U.S. Department of Defense. Though it’s no longer in use, WGS72 was designed as a framework to standardize geographical coordinates for mapping and satellite navigation systems.
GRS80
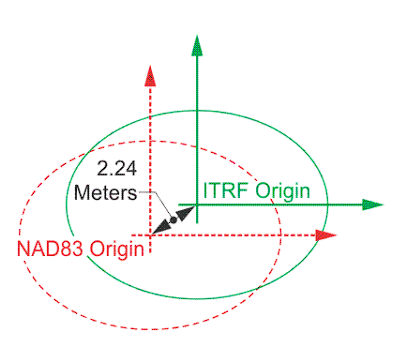
GRS80 is an acronym for the Geodetic Reference System of 1980. As an oblate ellipsoid, GRS80 is used primarily for accurate earth measurement and mapping. The International Association of Geodesy chose GRS80 as a standard reference system for earth science and geodesy applications.
It provides a foundation for GPS and other geodetic computations. However, the GRS 80 ellipsoid is 2.24 meters away from the actual center of the earth, which means there may be small errors in precise location calculations.
WGS84 “G” Series
The WGS84 “G” Series are realizations of the WGS84 that have since been realized to the ITRF. It includes WGS84(G730), which was introduced in 1994 and based on ITRF91; WGS84(G873), which was introduced in 1996 and based on ITRF94; and WGS84(G1150), based on ITRF2002, which was introduced in 2002.
The G series increased the accuracy and stability of WGS84 and made it more precise and reliable. WGS84 became compatible with the internationally adopted ITRF. It also introduced a coordinate shift in Canada by 1.5m horizontally and 0.2 to 1 m vertically, which necessitated updates in GPS mapping systems and other geolocation services.
When to Use WGS84
WGS84 is the default datum used in global positioning systems and receiver devices, including GPS-enabled drones, smartphones, and navigation systems. It is preferred for applications requiring global compatibility and consistency.
ITRF
The International Terrestrial Reference Frame is a series of spatial datums developed and managed by the International Earth Rotation and Reference Systems Service (IERS). As a global reference frame, it enables accurate positioning for various systems and applications, such as GPS and satellite-based monitoring applications.
With the ITRF, surveyors, mappers, and other experts can accurately define the coordinates of each point on the earth with longitude, latitude, ellipsoidal height, and time. Also, ITRF/WGS works well for self-driving cars, robotics, and drones because they are geodetic frames.
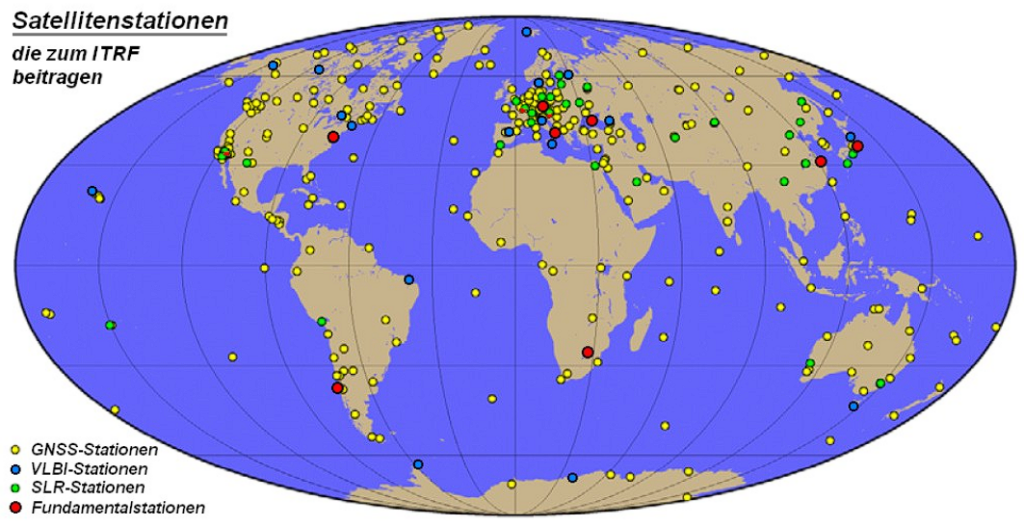
Since 1997, there have been a total of 7 new ITRF realizations. Each adds new data and the most recent advancement in surveying and mathematical methods, visually represented in the ITRF map.
{kind=link}
ITRF00
ITRF00 is the International Terrestrial Reference Frame of 2000. It was the version of ITRF that combined space geodetic solutions that are independent of tectonic plate motion models such as VLBI (Very Long Baseline Interferometry) and GPS (Global Positioning System).
It’s aligned to ITRF97 at epoch 1997.0 and originates at the center of the earth’s mass as sensed by satellite laser ranging (SLR).
ITRF08
ITRF08 Is the International Terrestrial Reference Frame of 2008 that improved on ITRF05. It is based on reprocessed solutions of four geodetic techniques—Very Long Baseline Interferometry (VLBI), satellite laser ranging (SLR), GPS, and Doppler Orbitography by Radiopositioning Integrated on Satellite (DORIS), spanning up to 29 years of observations.
It has zero translation and zero translation rates with respect to the earth’s center of mass, and it also has a null scale factor and a null scale rate. ITRF08 is believed to achieve 1 cm positioning accuracy like NAD(CSRS) over the SLR observations identified post-release.
ITRF2014
The ITRF2014 is the realization of ITRS that is based on four geodesy techniques, which were Very long baseline interferometry (VLBI), satellite laser ranging (SLR), Global Navigation Satellite Systems (GNSS), and Doppler orbitography and radiopositioning integrated by satellite (DORIS).
Unlike preceding ITRF releases, the ITRF2014 was generated with support for enhanced modeling of nonlinear station motions, including seasonal signals of station positions and postseismic deformation.
ITRF2020
ITRF2020 is the latest version of ITRF and is said to improve on ITRF2014. It is based on reprocessed solutions of the four geodesy techniques that have been previously used in realizing new ITRFs: VLBI, SLR, GPS, and DORIS. In addition to using four geodesy techniques for accuracy, ITRF2020 included local ties, equating station velocities, and seasonal signals.
ITRF2020 introduced Post-Seismic Deformation parametric models, a model for predicting and accounting for the earth’s deformation following major seismic events. It also presented annual and semi-annual periodic terms expressed in the earth’s center of mass as sensed by SLR.
What do these new introductions mean for ITRF? These new introductions and upgrades improve the accuracy and reliability of the reference frame, particularly in regions prone to seismic activity, by better modeling the dynamic and cyclical nature of Earth's movements. This leads to more precise and useful geospatial data for various applications.
ICRF
ICRF is an acronym for the International Celestial Reference Frame. Just as the ITRF is a realization of ITRS, the ICRF is a realization of the international celestial reference system.
Although not as popular as ITRF, the ICRF is also a coordinate reference system that comprises a catalog of precise coordinates of extragalactic radio sources using the VLBI technique.
When to Use ITRF
The ITRF geodetic frame can be used for a wide range of ground-based observations, such as robotics, drones, self-driving applications, agricultural mapping, climate research, infrastructure development, as well as space-based observations, such as satellite positioning, earth observation, space debris tracking, and astronomical referencing.
ITRF provides a highly accurate and stable global reference frame essential for precise measurements and global data integration across different scientific disciplines and applications.
WGS84 vs. NAD83 vs ITRF2014: What are the differences?
WGS84, NAD83, and ITRF2014 are all reference frames and geocentric datums, but they each have some distinct qualities that make them peculiar.
Here, we’ll re-examine how different WGS84, NAD83, and ITRF2014 are regarding their area of coverage, use cases, and regulations guiding them.
Local Datums vs Geodetic Frames
Local datums are datums whose spheroids are closely fit to the surface of the earth in a particular area. This means they provide the most accurate and practical means for mapping and surveying those regions.
Geodetic datums are datums that approximate the earth’s Geoid. This means they offer a more uniform and extensive framework than local datums and are more suitable for global applications such as international navigation and global mapping projects.
For instance, ITRF and WGS84 systems are global (geodetic), so their realizations consider that the earth is in constant motion due to the shifting of tectonic plates worldwide. However, NAD83, a local datum, has a fixed reference position (it is fixed to one plate, the North American plate, and moves with it).
Therefore, in the continental United States, NAD83 moves approximately 10 to 20 millimeters per year in relation to the realizations of ITRF and WGS84 reference frames. This means it’s not going to be quite as accurate for global positioning purposes in comparison to ITRF and WGS84.
Use Cases
Local datums and geodetic frames are all used for mapping, surveying, and navigation. However, WGS84, NAD83, and ITRF2014 have distinct use cases.
Geodetic frames such as ITRF and WGS84 significantly impact surveying and mapping accuracy around the world, while local reference frames such as NAD27 provide tailored geographic references that enhance the accuracy of North American surveying/GIS projects. ITRF and WGS84 also work well for robotics, drones, and self-driving cars.
Can NAD83 be used for GPS and can WGS84 be used for mapping in North American regions like Canada? Technically, yes. NAD83 can be used for GPS applications where high precision is not so critical, and WGS84 can be used for mapping in North America. However, it might not provide the same local accuracy as NAD83.
Regulations
NAD83 is defined by the National Geodetic Survey (NGS), a federal agency responsible for the United States geodetic infrastructure.
WGS84 is maintained and published by the United States National Geospatial-Intelligence Agency, responsible for providing geospatial intelligence in the defense and intelligence communities.
ITRF2014 is managed by the International Earth Rotation and Reference Systems Service (IERS), a global service organization dedicated to monitoring Earth's rotation and maintaining global reference frames.
Extent of Geocentricity
Datums are expected to be geocentric to align precisely with the center of Earth's mass. However, not all datums are precisely geocentric, even if they claim to be or were initially geocentric.
For instance, geodesists may claim that ITRF is geocentric, and NAD83 is not geocentric. Why? NAD83 was designed to fit the North American plate specifically, which causes its center to be offset from the Earth's center of mass.
Experts have identified that the latest versions of NAD83 (2011) and WGS84 (G1762) can differ by up to 2 meters in the United States, and since we all know that WGS is globally centered and NAD is tied to the North American plate, it’s clear that it’s NAD83 that does not align with the global geocentric standard.
Transforming between WGS84, NAD83, & ITRF2014
In their new definitions—NAD83 (2011) and WGS84 (G1762)—still differ up to one or two meters within the continental United States. On the other hand, ITRF08, ITRF2014 and WGS84 (G1762) are virtually identical if their epochs (moment in time) are the same. But how do we bring these reference frames to align more closely with each other? Transformation.
It's possible to transform a WGS84 coordinate to an ITRF2014 coordinate. You can transform latitude and longitude coordinates from WGS84 to their equivalent in ITRF2014 by applying a set of transformation parameters that account for shifts in tectonic plates and other temporal variations.
Similarly, you can transform elevation data from WGS84 to ITRF2014 using models that adjust for geoid and ellipsoid height differences.
The NGS has developed a Horizontal Time-Dependent Positioning (HTDP) program to transform positions from one epoch to another. In other words, this program allows the movement of positions from one date to another and transformation from one reference frame to another and supports the recent realizations of the NAD 83, ITRF, and WGS84.
Why is this transformation necessary? The answer is simple: for high-level precision. To ensure the highest level of precision in geodetic measurements, you'll need to use transformation parameters and software that can accurately convert between these two systems. However, it's often quite difficult to transform between datums.
Fortunately, Point One’s Polaris can transform between the datums for you so you can skip the hassle of using HTDP to transform between positions of epochs.
Access Location Precision with Point One
Whether you want to use ITRF84, NAD83, or WGS84, Point One makes it effortless to get the right datum for your location–whether that’s local or global. You can just connect to a single mount point and they ensure your devices are referencing the closest base stations and the appropriate local datum.
They’ve eliminated all the hassle from setting up, configuring, and using the service with the most common survey devices. Here’s what to expect:
- Survey-grade precision (cm-accurate) across the United States, European Union, United Kingdom, Australia, New Zealand, and Korea (and growing!)
- Connect your survey devices to Polaris in minutes — once and done!
- Never look up another mount point/base station again; Connect to a single mount point, and Polaris intelligently assigns you to your closest base station and provides results in the relevant datum for your continent/country.
- Support and automatic assignment of either ITRF2014 or local datums including NAD83, ETRS89, NZGD2000, GDA2020, JGD2011, and KGD2002.
- Save hours on every job site configuring and setting up base stations or harder-to-use RTK networks.
- Ditch the expensive base station rental or purchase.
- Untether your business from the constraints of geography and region.
- Connect to a fully managed network built entirely on industry-leading Septentrio receivers, with 99.99% uptime.
- Work on a network that is constantly growing, with over 100 new stations in the US this quarter alone.
Plus, you get everything at one transparent monthly price—$150 a month or $1,500 a year.
Learn more about Point One Navigation’s location precision solutions.