
LiDAR Isn’t Enough for Navigation: You Need GNSS & RTK Too
There are many opinions about what positioning technology is best for navigation. Thanks to rapid advancements in the geospatial industry over the past decade, a wide variety of positioning solutions exist for developers to choose from as they build location-enabled products. While this optionality ultimately provides the most space for innovation, it also can be overwhelming for developers selecting the right tech stack for their use case. Not to mention, there are many strong opinions about which approach is best.
You may have seen our recent blog post breaking down the differences between absolute and relative navigation, and why we firmly believe the best systems rely on a mix of both. We're here to expand on this earlier piece by deep diving into the technology involved, showing that the only way to build precise, and safe navigation systems is to combine LiDAR, GNSS & RTK.
Here’s why.
LiDAR-based vs RTK-powered navigation
To fully understand the debate between LiDAR-based and RTK-enabled navigation systems, it’s important to highlight the similarities and differences between these two solutions. Each approach has clear drawbacks, but also strengths that can fill in the gaps left by the other method when combined.
What is LiDAR-based navigation?
Let’s first dive into LiDAR-based navigation. This traditional approach to navigation involves setting up a LiDAR to observe real-world conditions and provide information to the system that determines how to proceed on a given route. LiDAR is a common approach which relies on light to determine distance, structures, and other important factors for navigation.
By itself, LiDAR can be used for relative navigation and mapping, object detection and avoidance. However, once you add GNSS sensors, the capabilities of LiDAR are amplified and usage in the absolute frame is made possible.
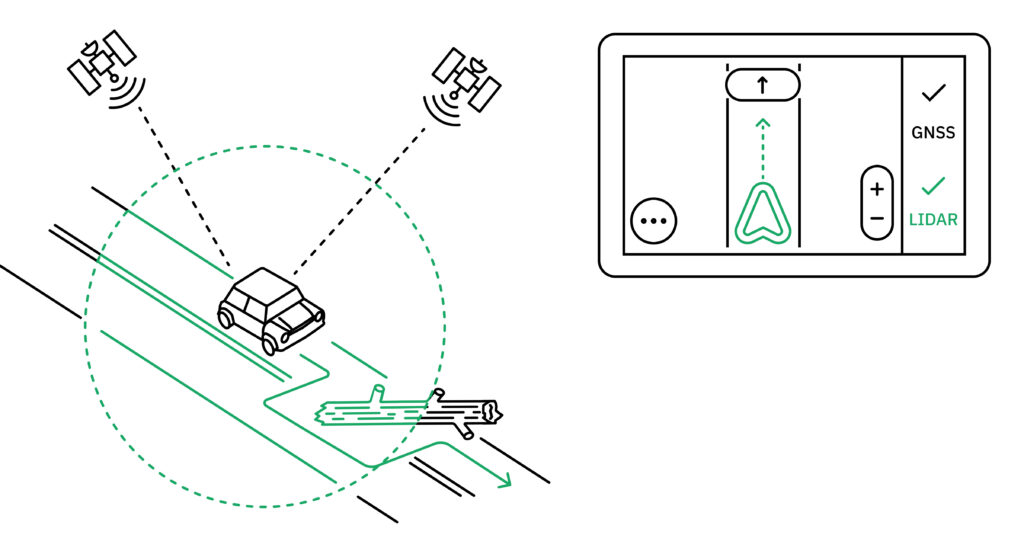
Once a GNSS is attached to the LiDAR, you can start building 3D geo spatially referenced maps in the absolute frame, allowing your robots to navigate in the global frame leveraging LiDAR. However, relying uniquely on LiDAR for localization may not be good enough at scale:
1. It’s really expensive to set up
LiDAR equipment can cost thousands of dollars, a huge investment for a single navigation system. In addition, processing LiDAR data is expensive when you consider the time and resources involved. To make a map with LiDAR for absolute navigation, developers must not only make this initial investment in hardware, but also fuse together the heavy amount of information LiDAR collects. This process, often referred to as stitching or geometric matching, is computationally expensive and time-consuming. We wrote more about this in detail here, but the bottom line is LiDAR is a huge upfront investment of time and money. On the bright side, it’s usually a one-time purchase of equipment.
2. The world changes incredibly fast - too fast for LiDAR to keep up at scale
The other downside of using LiDAR for navigation is that it is difficult to scale with the dynamically changing world. Even after you’ve invested the resources to build a map for absolute navigation, if you want to keep that reference up-to-date and leverage LiDAR for relative navigation scenarios, you’ll need to constantly collect and curate the data for it to be usable. Distributing LiDAR data in real-time to a fleet of vehicles so they can conflate newly scanned and previously downloaded points requires a lot of processing power that’s not feasible across large geographic areas.
To summarize, LiDAR-only navigation can work well for applications that are very limited in scope or area of operations, but it's not suitable for any open-world autonomy without a large investment in map-making and processing algorithms.
How can RTK enable more precise navigation?
On the other side of the navigation debate are RTK-enabled GNSS solutions. This approach involves using positioning signals from global satellites and leveraging the absolute reference frame to power navigation applications. There are a few different reasons why GNSS signals can be inaccurate, but RTK solutions resolve these errors and produce high-precision, reliable positioning information for navigation.
RTK works by using base stations to transmit a reference signal to a GNSS receiver, then calculating and correcting for the positional discrepancy by measuring the difference between the base station position and the receiver. As a result, RTK-enabled GNSS can provide a consistently updated absolute reference frame for navigation.
RTK can also be combined with IMU solutions to create a comprehensive sensor fusion GNSS for absolute navigation in signal deprived or high multipath environments. The combination of RTK and IMU makes the navigation system more resilient to signal outages, and can reduce multipath errors by up to 90%. You can read more about the benefits of fusing RTK and IMU in our recent blog here.
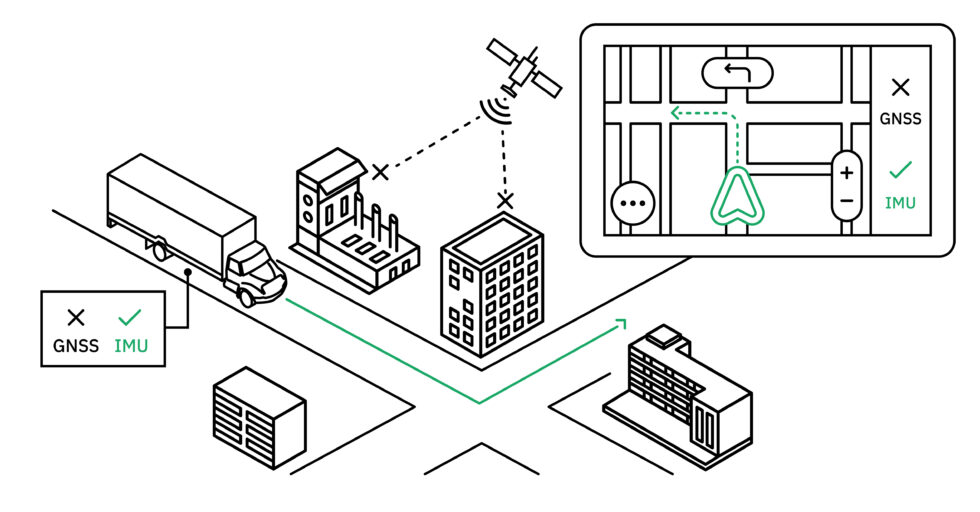
Let’s look at another hypothetical example. A truck in a fleet may be driving on its predetermined route, relying on an RTK-powered reference frame for most of its journey. However, as it enters a dense urban environment, it loses its GNSS signals. The IMU and rotary encoders built into the fleet’s system then kick in to navigate through the urban canyon.
RTK makes it possible for navigation systems to leverage high-precision GNSS signals, and can work seamlessly with IMU to power absolute navigation, but also has its fair share of drawbacks. Most developers consider RTK to be inaccessible, mainly because:
1. RTK has historically been difficult to set up
Although RTK is largely considered the gold standard in GNSS signal correction technology, it has traditionally been difficult to do well. This is because successful RTK requires a large network of base stations set up in close range to GNSS receivers, which can be expensive and time-consuming.
2. Outsourced RTK has traditionally been expensive
While there are some third-party RTK providers that eliminate the need for developers to set up their own extensive network, they are often extremely expensive to subscribe to – in some examples, nearly $1000 a month – which creates a significant barrier to entry for many looking to leverage it in their navigation systems.
Long story short, RTK provides a lot of benefits for navigation (including no need for complex algorithms or data stitching), but can sometimes require a large, ongoing investment.
LiDAR, GNSS, & RTK: the ultimate navigation tech stack
Now that we’ve reviewed the pros and cons of both computer perception and sensor fusion GNSS for navigation, we can firmly state our controversial opinion on the matter: the best navigation systems combine these approaches to achieve the highest precision and efficiency.
The ultimate goal in navigation is to get technology to replicate human decision-making as much as possible. Looking at LiDAR-based and RTK-based navigation independently, there are still many gaps that geospatial innovation must overcome before either is a comprehensive solution. However, if we use each approach’s strengths to complement each other and fill in those gaps, we can optimize both absolute and relative navigation techniques to produce the most human-like systems possible with today’s technology.
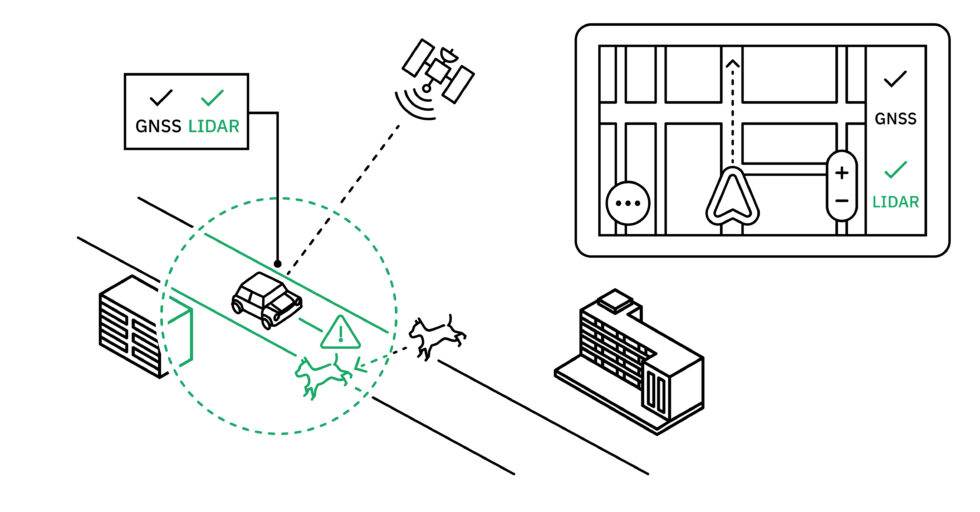
For example, an autonomous vehicle can rely on an RTK and GNSS created reference map to plan most of its routing, falling back on IMU when GNSS signals are lost. The scalability of RTK-enabled GNSS makes updating this absolute map more feasible, but there will still be instances where relative navigation methods must kick in. That’s where LiDAR comes in; while not as scalable as RTK, making a one time investment in LiDAR will not only provide the sensors needed to detect and avoid obstacles not captured in the absolute reference frame, but also capture data to complement the positioning information derived from RTK that ultimately feeds the reference map. In terms of our example, the AV would be equipped to safely and effectively navigate a path, even if that path is in a signal-deprived area with obstacles.
Combine your RTK and LiDAR strategies with Point One
To enable developers to put our theory into practice, Point One has developed a comprehensive suite of accessible positioning technology. Our Polaris RTK network is unmatched in both scale and affordability, starting at $150/month for access to signal corrections from 1,400+ global base stations. Atlas INS works seamlessly with this network to achieve centimeter level positional accuracy even when signals are lost and navigation systems must switch over to IMU. What’s more, Atlas and Polaris can both be easily integrated with ROS and similar operating systems to streamline LiDAR data stitching and map production, making it possible to develop a universal reference frame based on both absolute and relative navigation principles.
Point One is consistently innovating in the navigation space to provide developers with the most accessible, affordable, and reliable positioning solutions for their tech stack. We’re even working on an affordable camera-based VIO solution that will make it easier than ever to augment your positioning engine with frame to frame matches and no extra compute. Stay tuned for more information.
To get started developing your own optimized navigation tech stack, get in touch with Point One’s team of experts.